Week 12 13
WEEK 12-13
MonteCarlo Visual Location
-
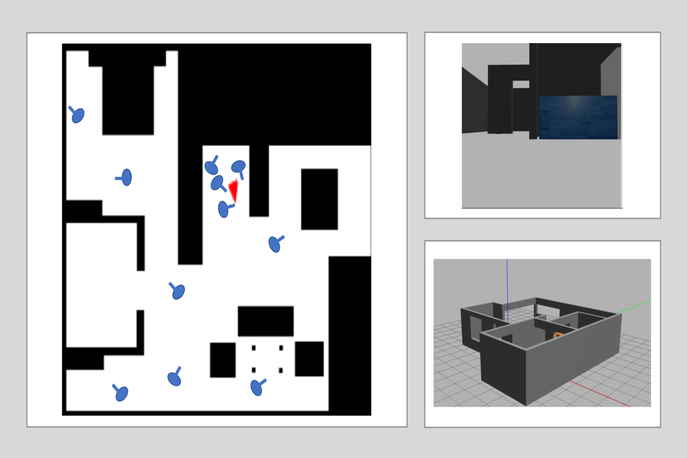
An exercise has been developed for visual localisation of a mobile robot using the montecarlo or particle filter algorithm.
- What is the particle filter for visual localisation?
-
Monte Carlo localisation is based on a collection of particles or samples. Particle filters allow the localisation problem to be solved by representing the a posteriori probability function, which estimates the most likely positions of the robot. The a posteriori probability distribution is sampled, where each sample is called a particle.
-
Each particle represents a state (position) at time t and has an associated weight. At each movement of the robot, they perform a correction and decrease the accumulated error. After a number of iterations, the particles are grouped in the zones with the highest probability, until they converge to a single zone, which corresponds to the robot’s position.
-
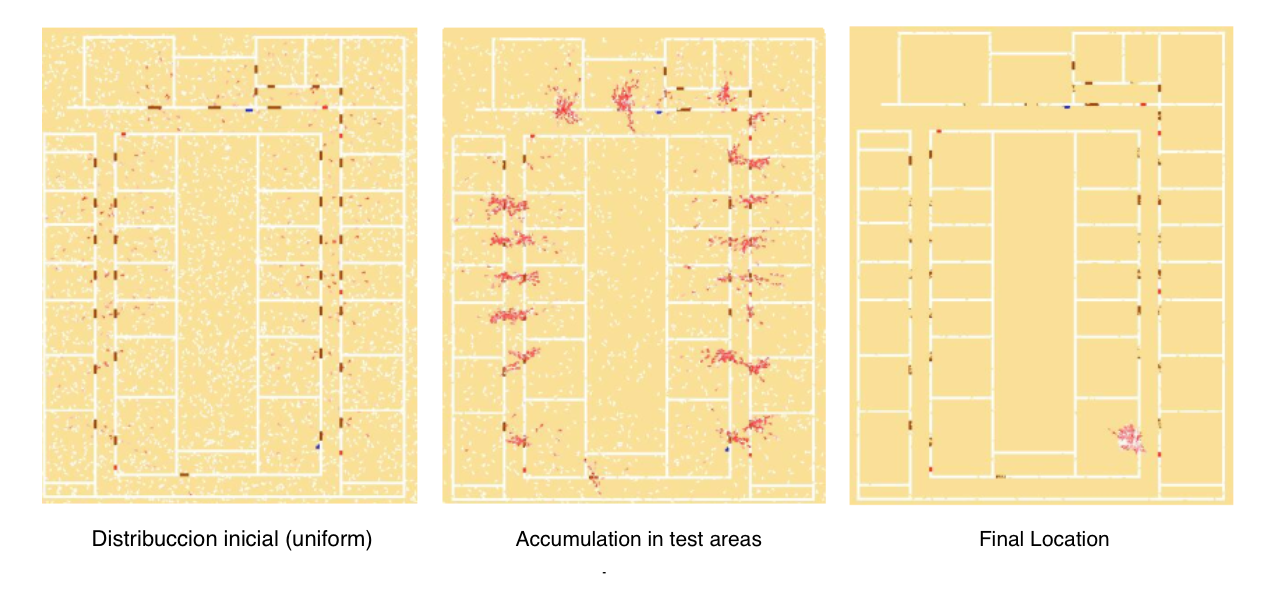
The following figure shows an example of the operation of the particulate filter. At the initial instant the particles are uniformly distributed in the environment. As new observations are obtained, the particles accumulate in probability zones until they converge to the probability zone:
-
-
This exercise has been added to both RoboticsAcademy and Unibotics
- The documentation necessary to use the exercise has been added.
To be done
- It would be necessary to add a reference solution and a video about the exercise.