Week 16 17
WEEK 16-17
MonteCarlo Visual Location
-
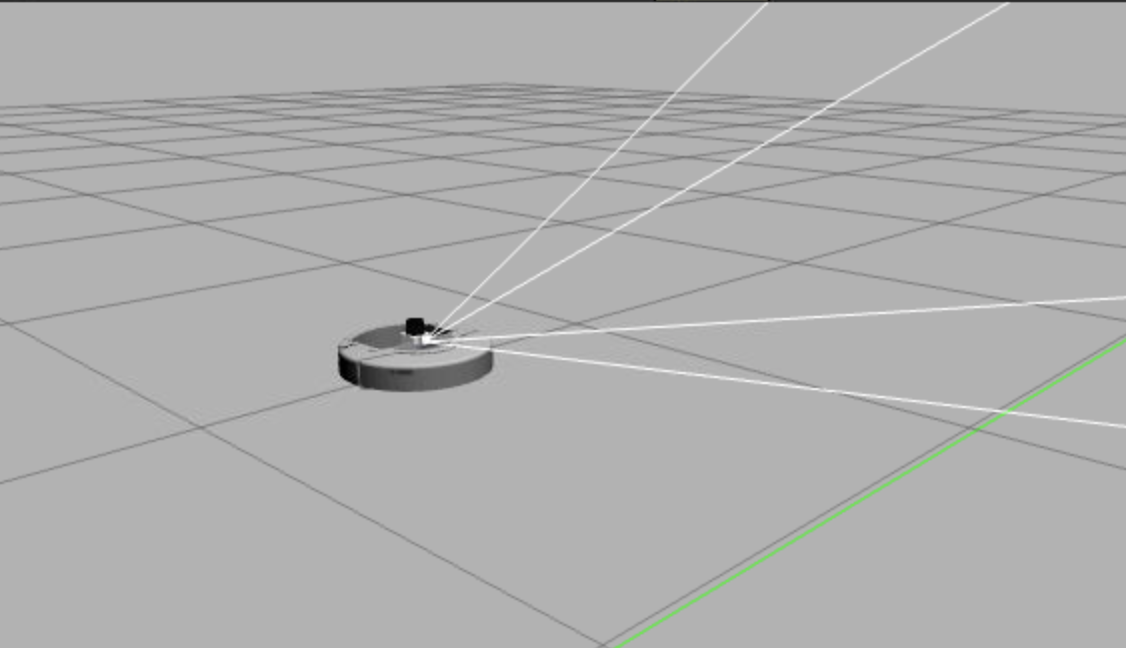
We have replaced the robot with a roomba that has an integrated camera.
- A 3D viewer has been added that allows to paint the real position of the robot and also the estimated position in order to compare the trajectory.
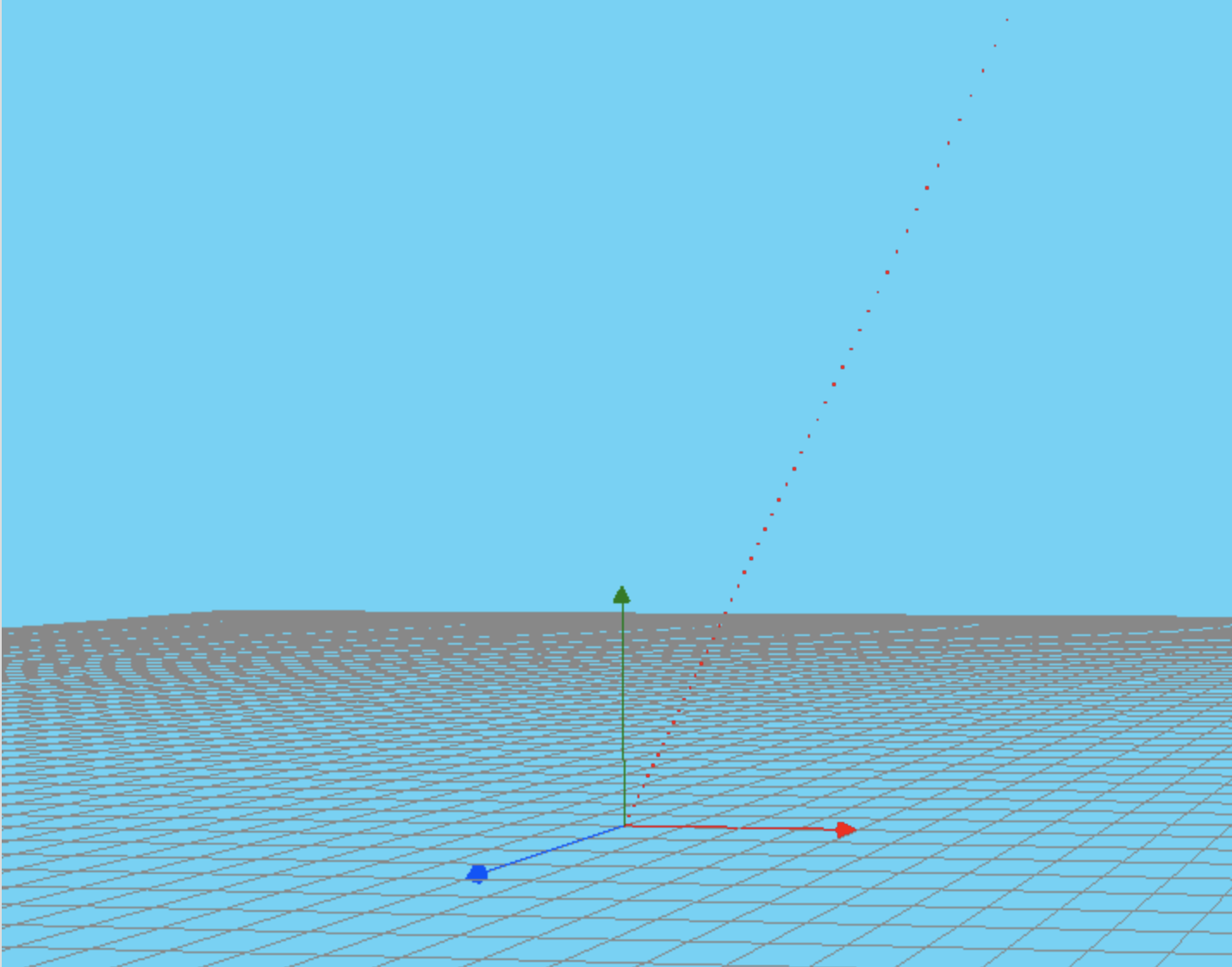
-
To show the estimated position in the 3D viewer and to be able to use the evaluator in unibotics, a function called GUI.showPose3D([posx,posy,poz]) has been developed.
-
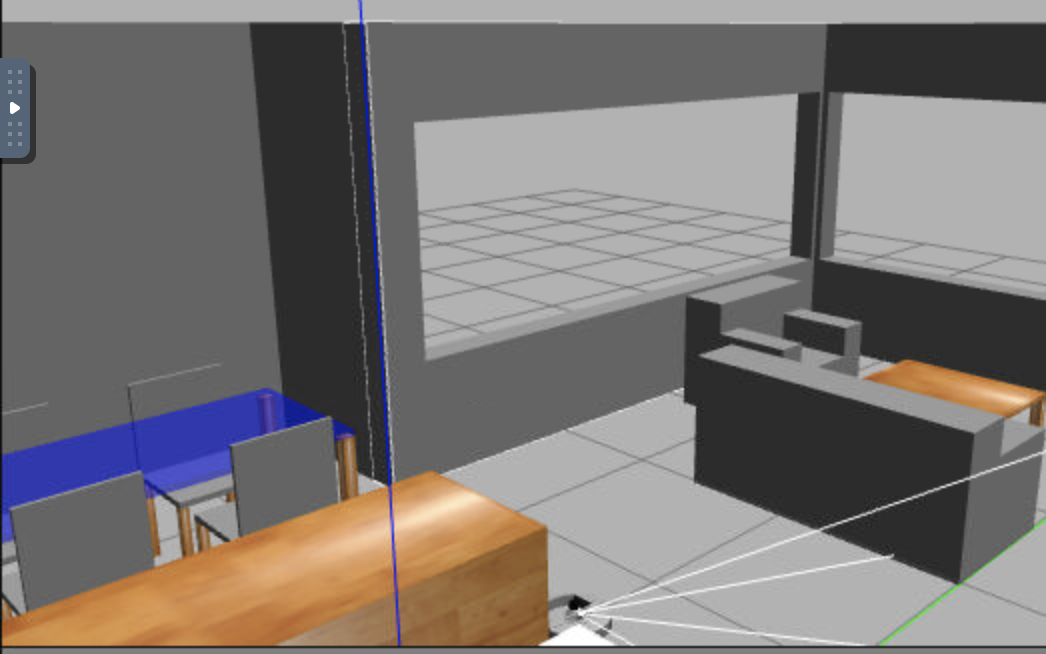
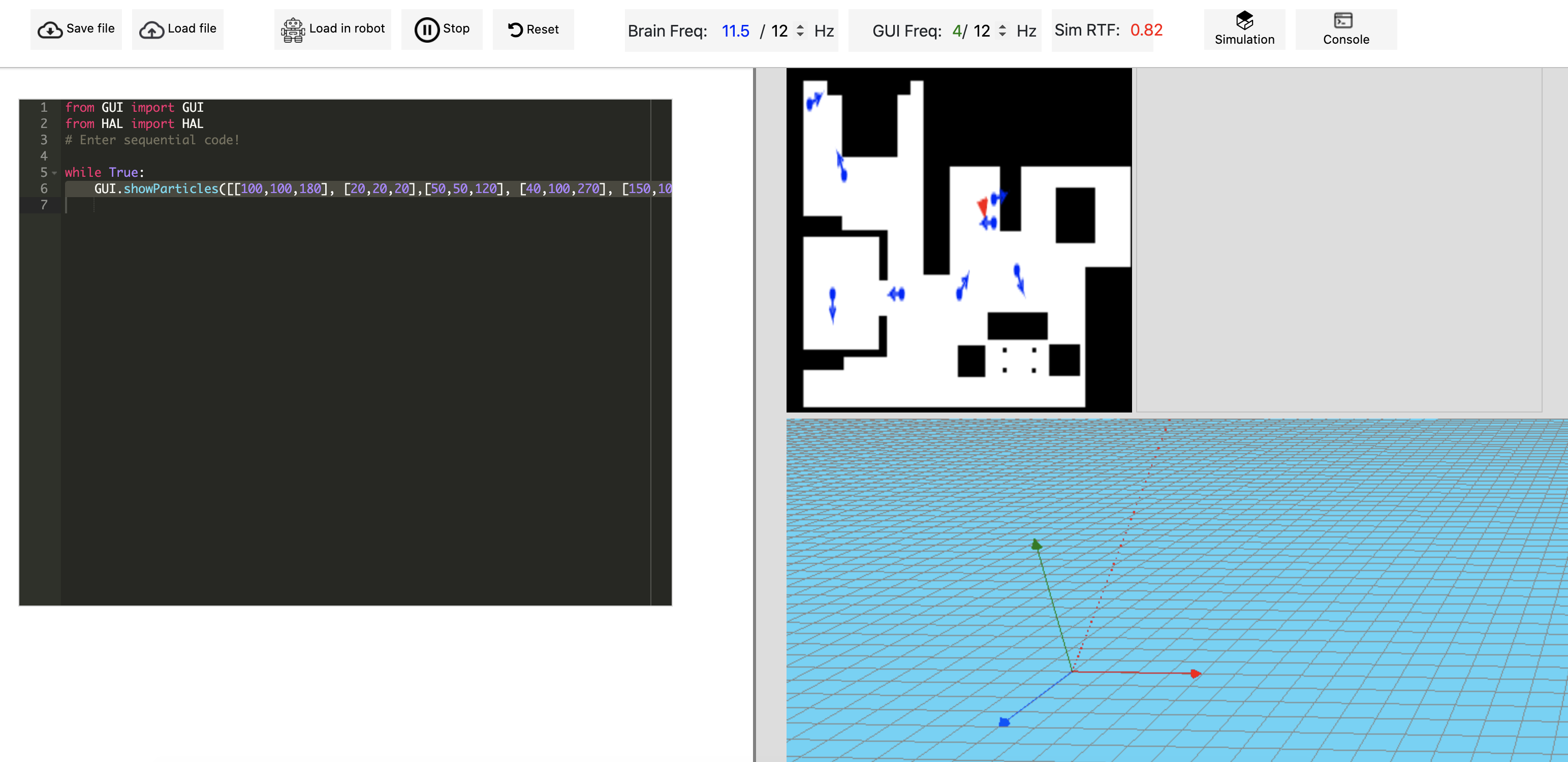
The editor would now look like this:
- The documentation of the exercise has been updated.
To Do:
- Finish off the solution to the exercise