3D Visual Odometry. Preimplementation
Problema
Lo que se quiere obtener es que a partir de una sucesión de imágenes, se consiga seguir la trayectoria que describe la cámara en el vídeo.
Concretamente, en este sub-problema se persigue la creación de un ejercicio de referencia, así como su la auto-corrección de otros ejercicios, fuera de la aplicación de RoboticsAcademy.
Vamos a hablar un poco sobre la odometría visual.
Odometría Visual
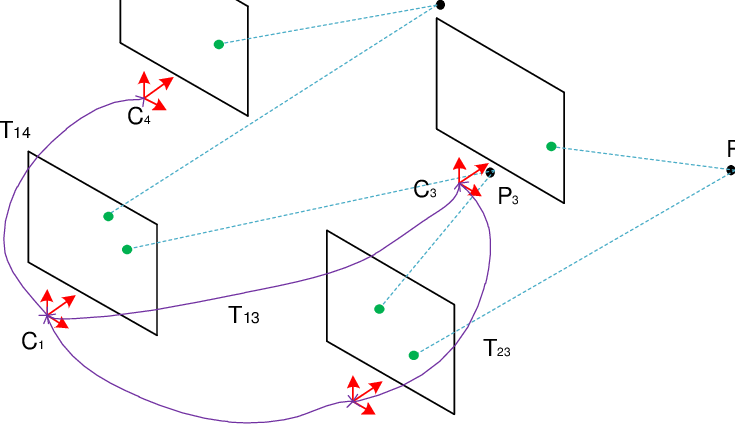
La odometría visual consiste en calcular la rotación y traslación, pose (R, t), de la cámara a partir de un conjunto de puntos extraídos de dos imágenes. Se trata de una técnica incremental, ya que se basa en la posición anterior para calcular la pose del segundo frame.
Para ello se puede seguir la siguiente estrategia:
- Adquisición de dos frames consecutivos.
- Detectar sus características. Usa la forma que más te guste.
- Relacionar las características de la primera imagen con la segunda. Hay dos métodos:
- Correlación.
- Flujo Óptico.
- Encontrar la matriz esencial, así como la rotación y traslación asociada.
- Averiguar la escala en caso de que sea odometría visual monocular.
- Actualizar las matrices R, t del movimiento absoluto.
Visor
Para la realización del visor se ha dedicido hacerlo con Three.js. Actualmente solo se puede mover la cámara por el mundo. Se puede consultar el código aquí. Donde el código principal es script.js.
Actualizacion del visor
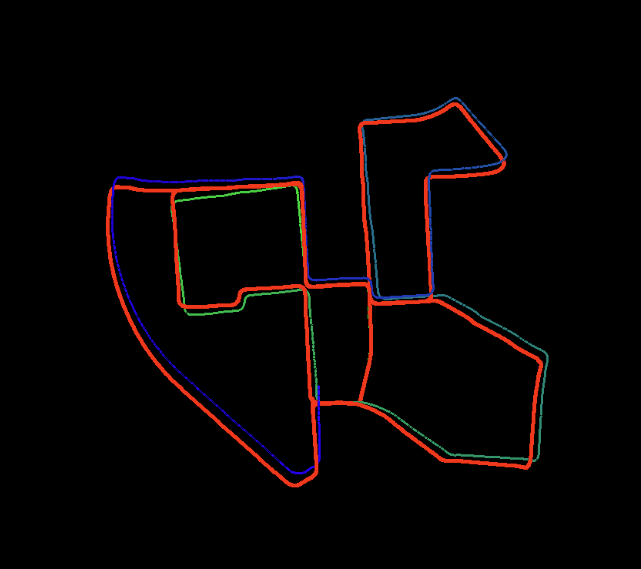
En esta actualización se ha desarrollado un nuevo front, por el que se visualizarán las trayectorias, tanto la estimada como la verdadera.
Este frontend funciona sobre una arquitectura de cliente servidor, en el que el servidor, una vez detecta un nuevo usuario en el canal (en principio solo hay un sólo usuario), este empieza a realizar el trabajo de odometría, y a enviar, mediante un puerto socket, los resultados que se obtienen. Estos resultados de pose, se visualizaran en el navegador.
Como hitos a destacar:
- He tenido que aprender desde cero como funciana el desarrollo web, (HTML, CSS, JS).
- He profundijado el conocimiento de la programación asíncrona.
Aún así, se ha observado que el algoritmo que se tiene implementado ahora, funciona mejor en datasets cuyo recorrido es 2D que 3D. Se debe mejorar este algoritmo. Pero por mi parte se puede ir continuando en el desarrollo del autocorrector y empezando la integración con la plataforma de RoboticAcademy.