Week 3. Working with the first prototype for syncronous exercise
Week 3. webRTC-prototype
Hello all!
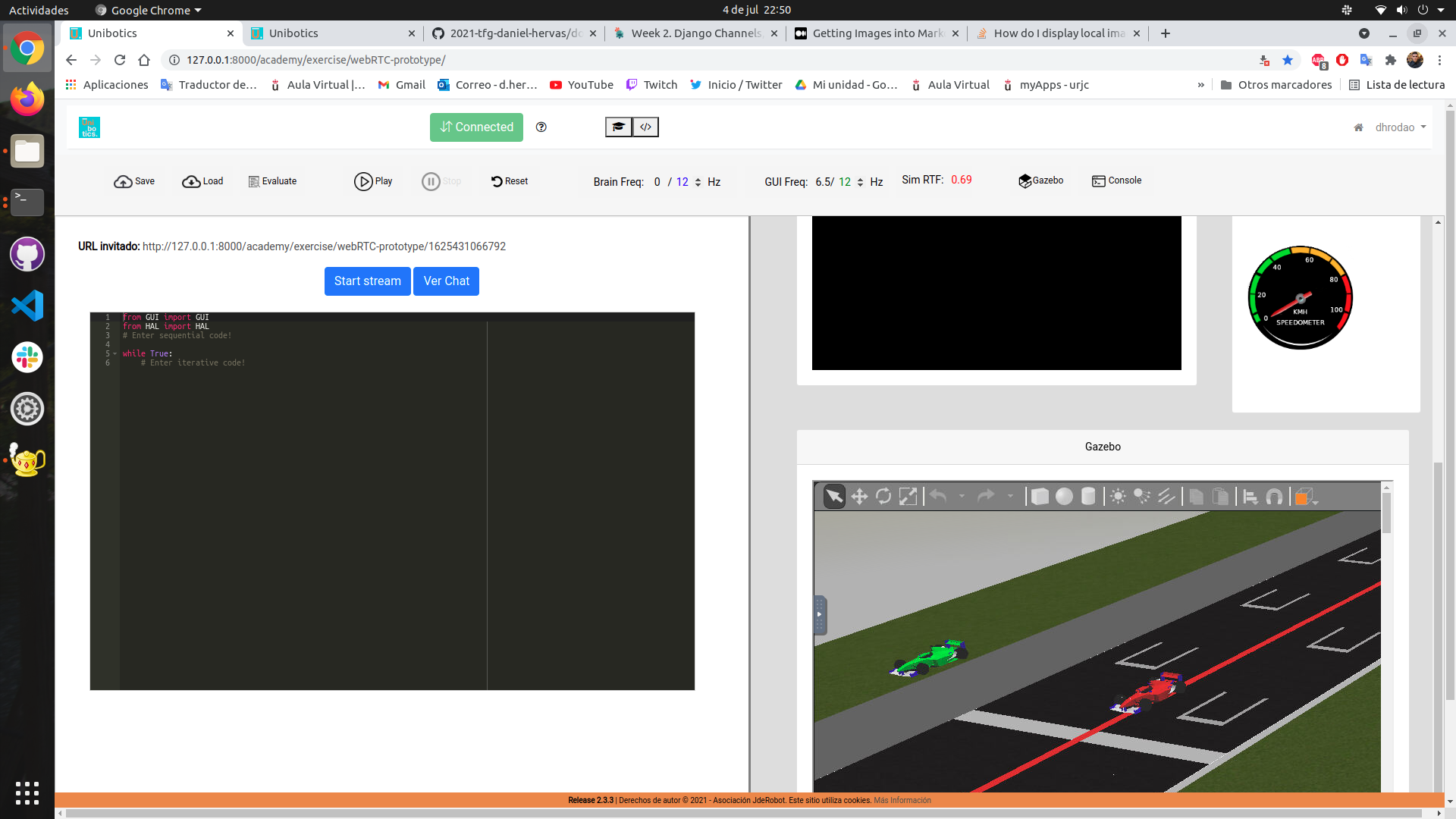
On this week I have created a new exercise named webRTC-prototype. For this exercise, I haver designed two templates (one for the host and the other one for the guest).
On the host side, I’ve addapted my noVNC streaming code in order the host is able to stream it’s Gazebo screen to its friend.
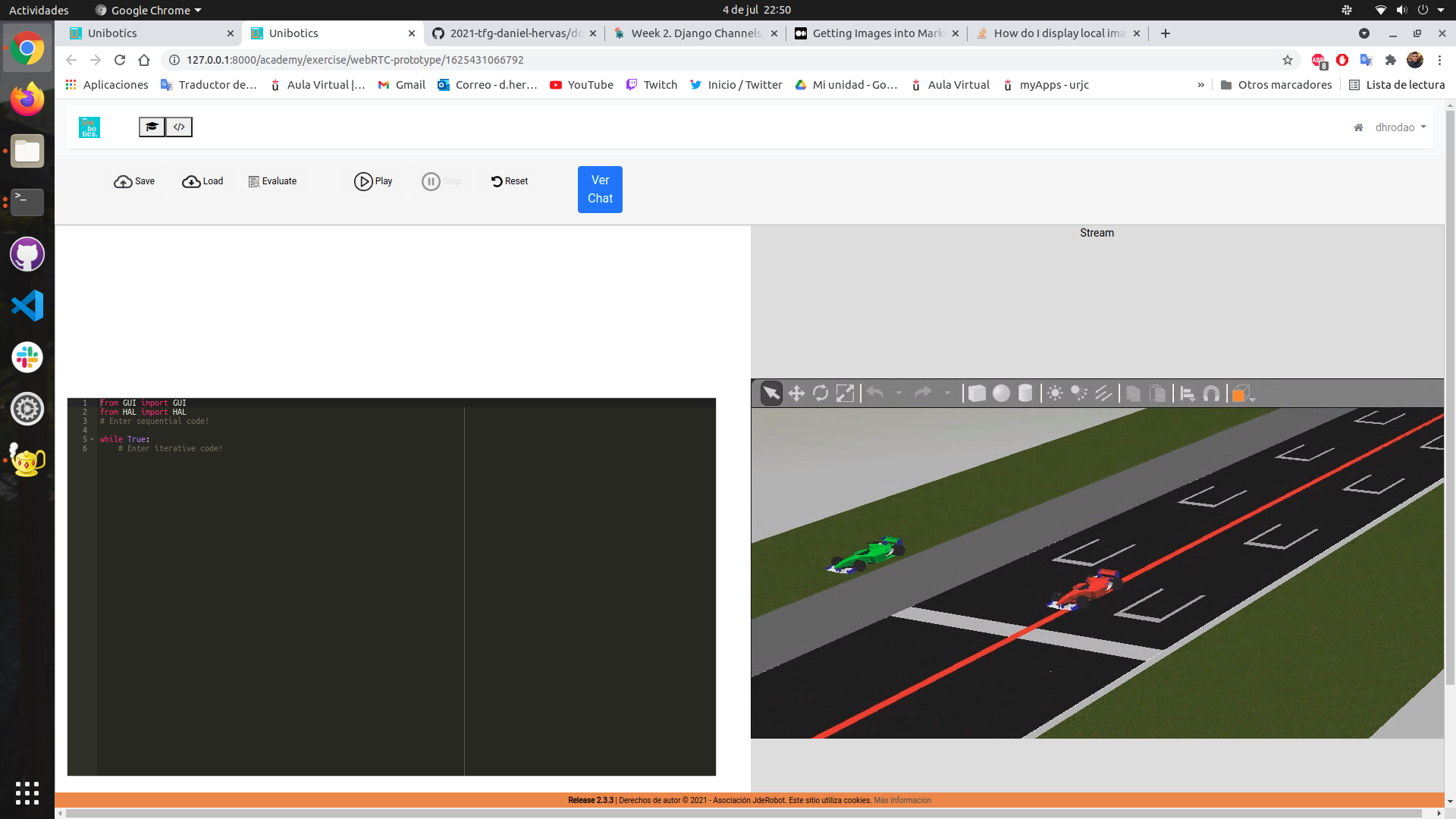
For the guest side, the template I’ve designed doesn’t contain any gazebo controls, for this first version only the host willl be able to control the exercution of the codes.
Finally, I’ve been studying the docker-side code and I’ve found the path for the f1 model that is displayed in Gazebo scenario. With this, I cloned the f1 model, and, used blender in order to change the car color. The f1_guest is green color and also its script is publishing in other ROS topics starting by “F1ROSGuest/”.
Here are some screenshots of the templates for the new exercise: