Week 4. First prototype of WebRTC Exercise
Hello all!
On this week I’ve worked on having two working brains, one for each car (Host and Guest). Now we are able to run code on both of the cars.
Also, I’ve added the bird-eye for the Guest car, so now we can see both of the cars on the canvas birds eye map.
The last I got to say is that I’ve developed a library that allows to calculate the distance between the two cars using an array of checkpoints along the circuit. Here is a visual example for the final template:
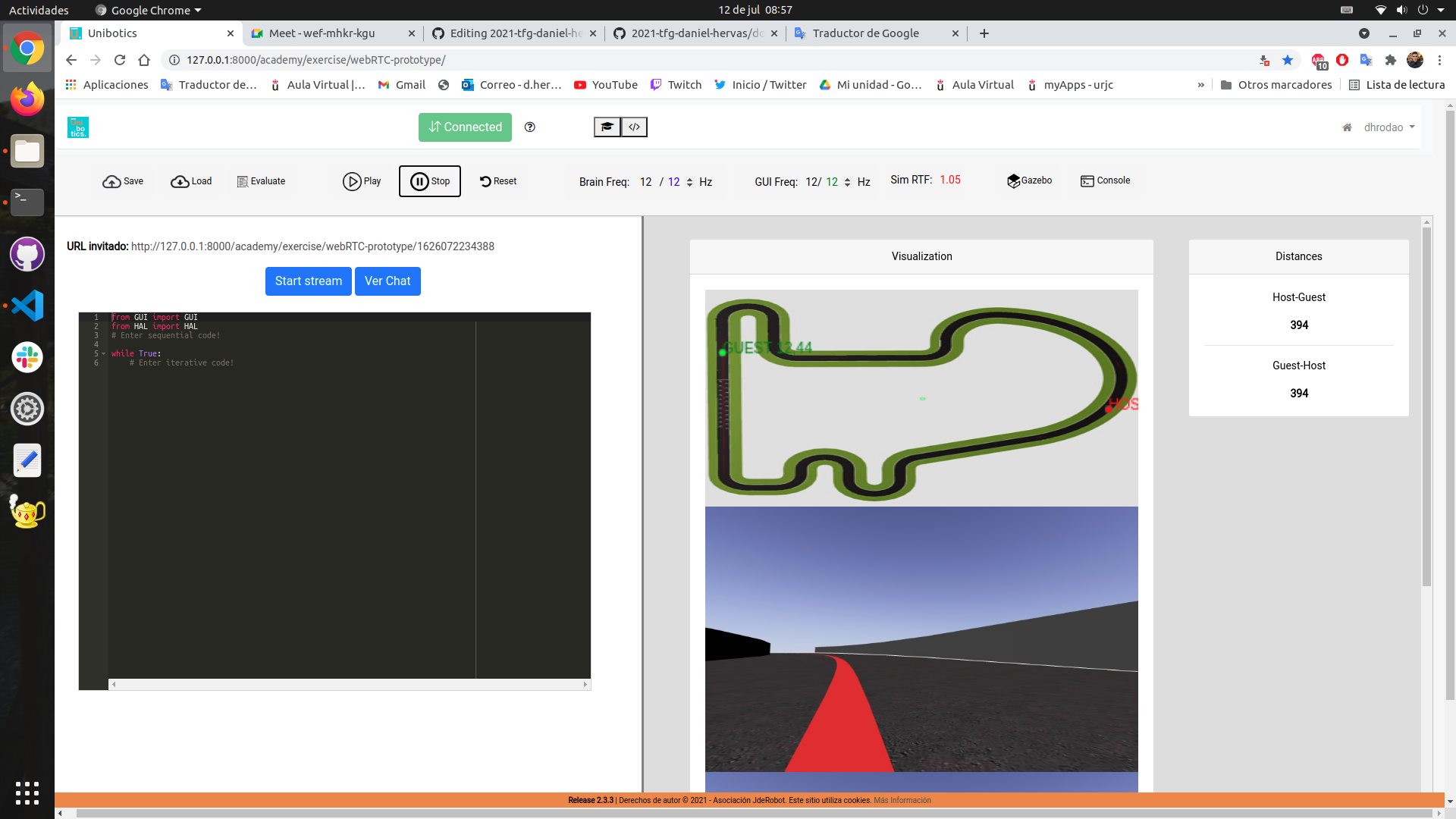
Here is a video demonstration for the WebRTC-prototype exercise:
