Week 17. Trying to subscribe to one topic
I already had a little notion of what a ros topic is, so now it’s time to start coding and finishing to understand how they really work.
I needed to do it for a lot of exercises, but i choosed to start with the obstacle_avoidance as it seemed quite normal.
The first thing was making sure I could find the topic that exercise was using, so i read the code of it.
I could find that the position was set in the pose3d file, but not the topic it was using.
Luckily, there were some old files in the repository in which i could find the topic used!
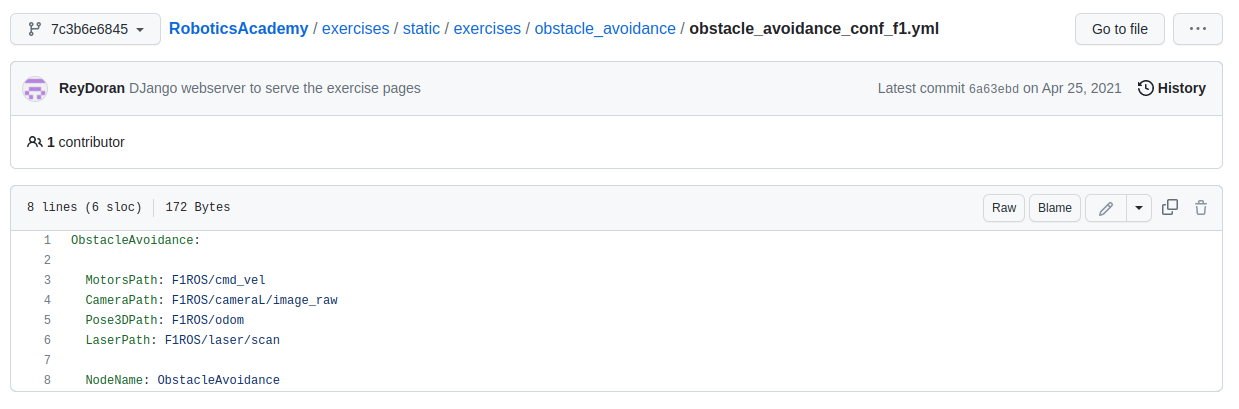
I’ll try to make a little python script that allows me to subscribe to that topic and check the position.