Semana 30: Nueva configuración de la red, turtlebot Gazebo11 para noetic
Durante esta semana he estado buscando las configuraciones de las redes neuronales para control extremo a extremo para autoconducción. La principal es la PilotNet de Nvidia. Una vez pasada a pytorch y onnx, entrenando con un conjunto de datos más extenso, todavía no consiguie tomar bien las curvas. Por ello es necesario modificar el dataset para que incluya más situaciones difíciles.
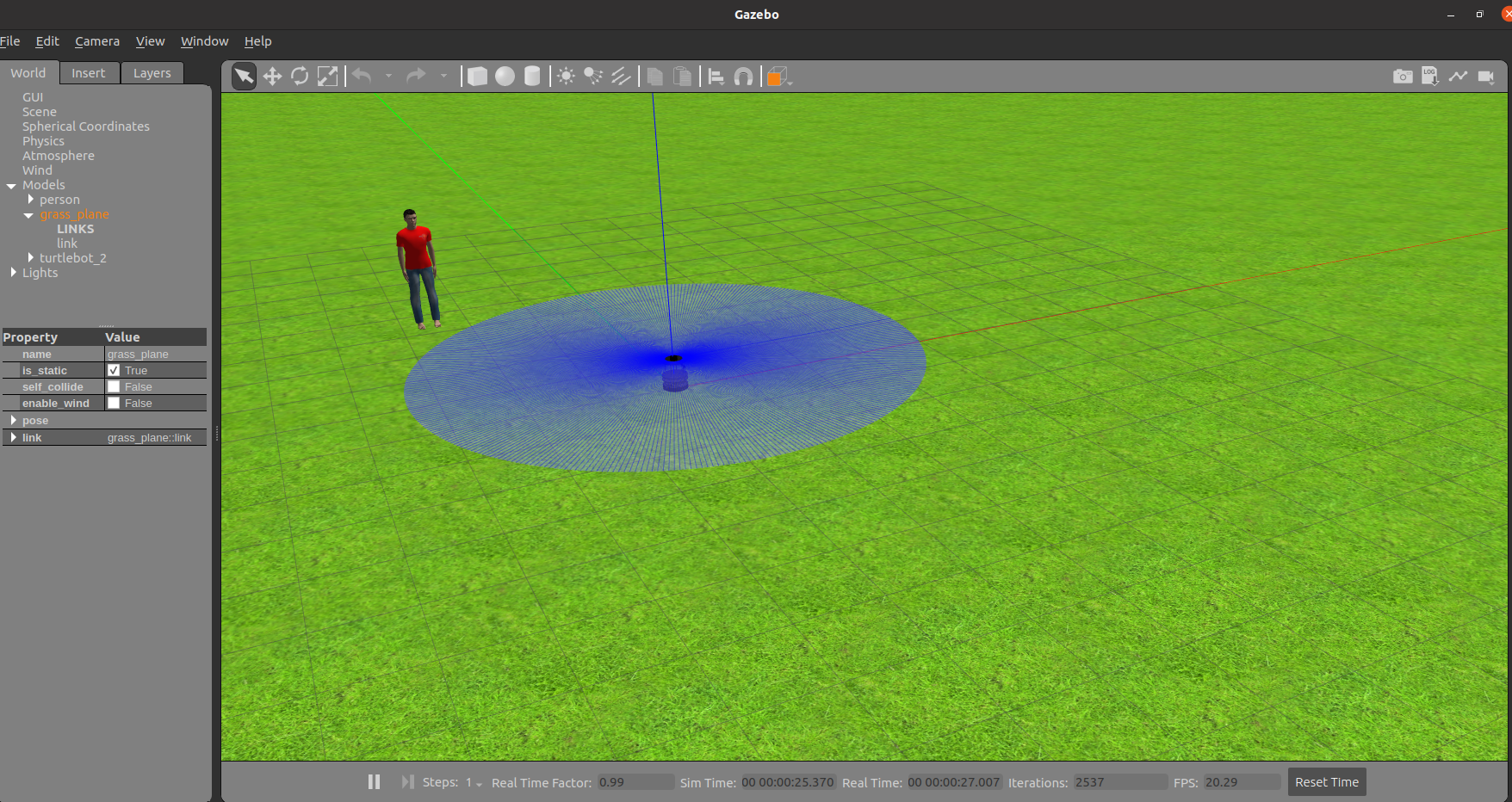
Por otra parte, he hecho un modelo del turtlebot2 para ROS Noetic y Gazebo11. Me ha sorprendido no encontrar ninguno que sirva solo para simulación en github. El oficial solo está disponible para la distribución Melodic y no llega a funcionar bien con las nuevas versiones. El robot será utilizado en una aplicación de sigue persona, siendo una simulación demostrativa: