
Semanas 39 y 40: Entrenamiento red coche holonómico y balanceo del dataset
Durante estas semanas he recopilado datos de los circuitos para ver cuánto se usa cada PID distinto del conductor experto en cada tipo de circuito. Los resultados son los siguientes:
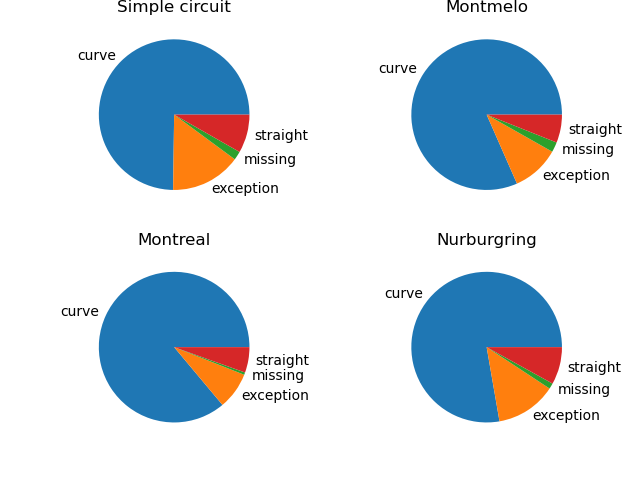
Es decir, que en casi todos los circuitos el controlador que actua la mayor parte del tiempo es el de curvas, seguido por el de excepciones.
El objetivo para la suiguiente semana es entrenar una red para controlar el coche holonómico. Las pruebas relizadas antes no han sido buenas, por lo que es necesario balancear el dataset para obtener mejores resultados. También he visto que el programa llega a dar error en entrenamientos largos (150 a 200 epochs), ya que al usar pytorch es posible reentrenar la red,he decidido entrenar la red en bloques de 50 epochs.