
Semanas 53 a 55: Pilotnet sigue carril holonómico, script para teleoperar y cambios en modelos
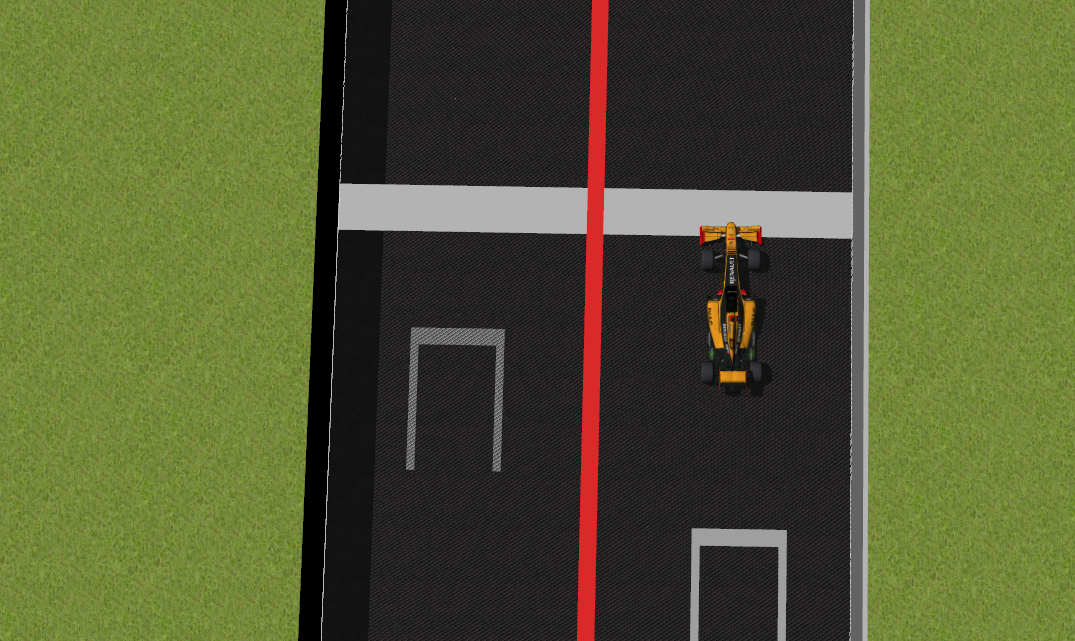
Durante estas semanas he entrenado redes siguecarril para el coche holonómico con buenos resultados:
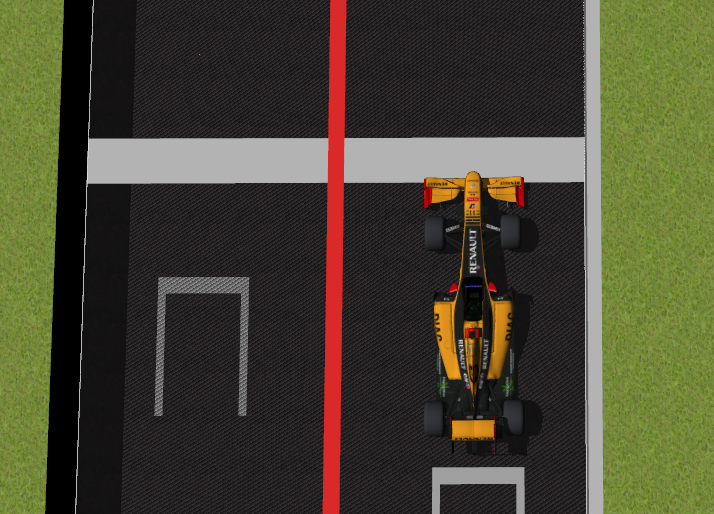
Curiosamente, en una primera versión de la red, también consigue mantenerse en el carril izquierdo a pesar de que en el dataset no existe ninguna imagen que sea de este tipo:
El resto del tiempo, ya que no he podido obtener un buen conductor explícito para el coche con dinámica de ackermann, he creado un script para teleoperarlo y así obtener un dataset:
Mientras probaba el controlador me he dado cuenta de varias cosas:
1.- En primer lugar he observado que las ruedas traseras del coche no se encontraban en la posición correcta a si que la he correjido.
2.- El tamaño de los circuitos no está correctamente escalado para el modelo con dinámica de ackermann:
Circuito con coche holonómico:
 ANTIGUO Circuito con coche ackermann:
ANTIGUO Circuito con coche ackermann:
 Nuevo Circuito con coche ackermann:
Nuevo Circuito con coche ackermann:
 3.- Ya que se comandan velocidades y no posiciones, es necesario cambiar el signo de la velocidad angular cuando se pasa de velocidad lineal positiva a negativa o viceversa. Lo he conseguido solucionar con la siguientes líneas de código:
3.- Ya que se comandan velocidades y no posiciones, es necesario cambiar el signo de la velocidad angular cuando se pasa de velocidad lineal positiva a negativa o viceversa. Lo he conseguido solucionar con la siguientes líneas de código:
if (old_linear_speed >= 0 and new_linear_speed < 0):
angular_speed = -angular_speed