
Week 103 - Prueba rápida del Test 1 en Town11
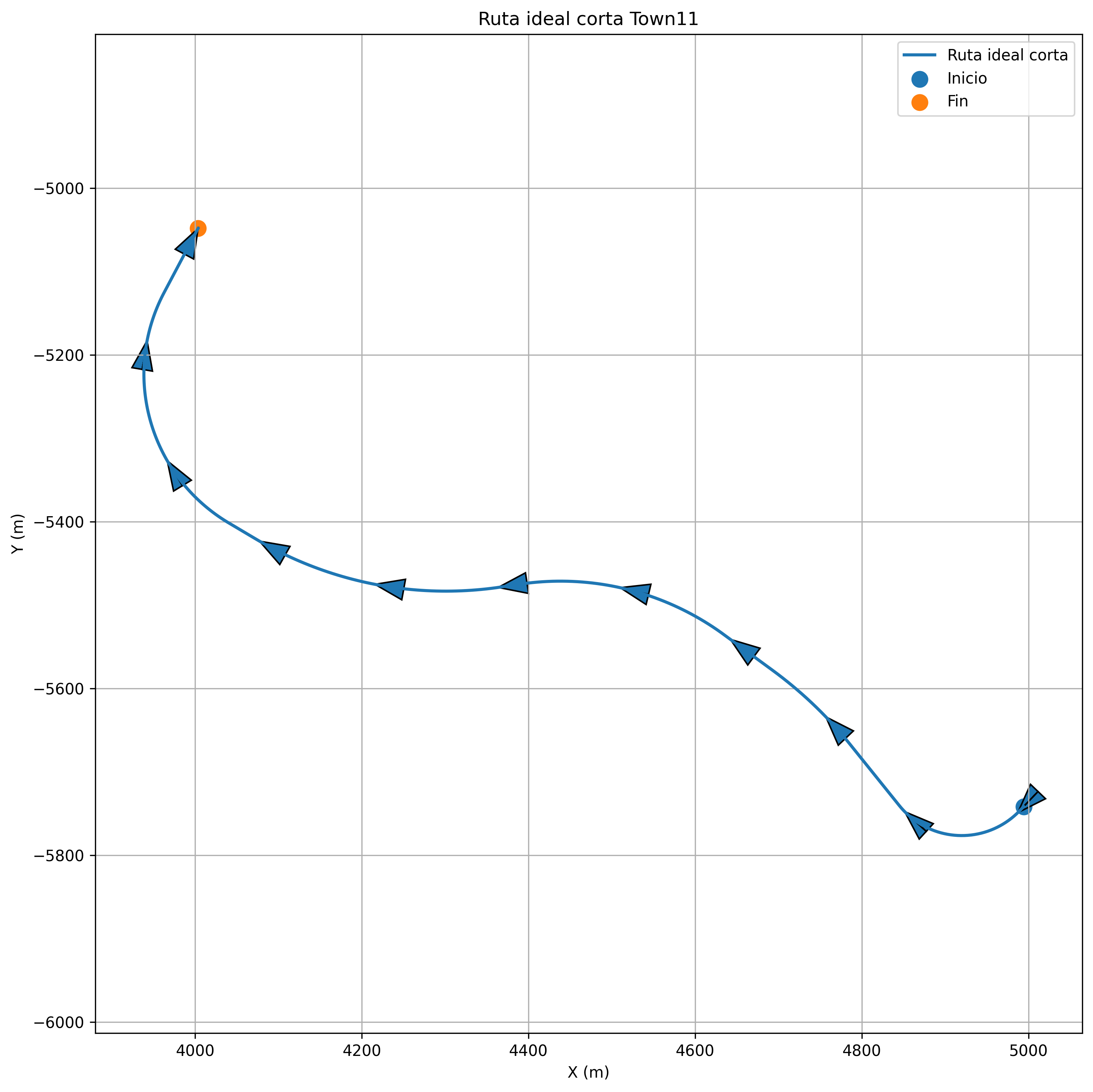
Con el objetivo de validar los resultados obtenidos en el Test 1, el escenario de evaluación se trasladó de Town02 a Town11, seleccionando un recorrido corto de aproximadamente 1.5 km con una mayor densidad de curvas. El propósito de esta prueba preliminar es determinar si las tendencias observadas anteriormente se mantienen en un entorno más desafiante, ya que en Town02 las diferencias entre los distintos conjuntos de entrenamiento no eran suficientemente evidentes.
Una observación importante es que el modelo Burbuja presenta un comportamiento diferente en este nuevo escenario. A diferencia de Town02, no logra completar todas las ejecuciones y, particularmente en la condición de izquierda dura, el vehículo no consigue incorporarse correctamente al circuito, reduciendo su tasa de éxito.
Escenario de evaluación
Configuración experimental
Con respecto al Test 1 original, se realizaron dos modificaciones en las condiciones iniciales:
- Se cambió el escenario de Town02 a Town11.
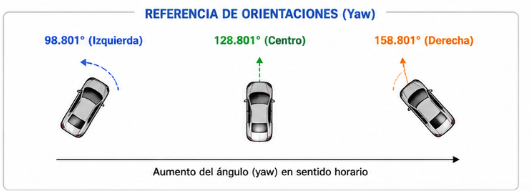
- Se incrementó la perturbación angular inicial del vehículo en 15°, pasando de una variación de ±15° a ±30° respecto a la orientación nominal de la vía.
De esta forma, se evaluaron 15 condiciones iniciales, resultado de combinar cinco desplazamientos laterales con tres orientaciones iniciales.
| Caso | Posición lateral | Offset (m) | X (m) | Y (m) | Z (m) | Yaw (°) |
|---|---|---|---|---|---|---|
| 1 | Duro Izquierda | +4.80 | 4802.80 | -5679.508 | 100.175 | 98.801 |
| 2 | Duro Izquierda | +4.80 | 4802.80 | -5679.508 | 100.175 | 128.801 |
| 3 | Duro Izquierda | +4.80 | 4802.80 | -5679.508 | 100.175 | 158.801 |
| 4 | Suave Izquierda | +2.40 | 4800.40 | -5679.508 | 100.175 | 98.801 |
| 5 | Suave Izquierda | +2.40 | 4800.40 | -5679.508 | 100.175 | 128.801 |
| 6 | Suave Izquierda | +2.40 | 4800.40 | -5679.508 | 100.175 | 158.801 |
| 7 | Centrado | 0.00 | 4798.00 | -5679.508 | 100.175 | 98.801 |
| 8 | Centrado | 0.00 | 4798.00 | -5679.508 | 100.175 | 128.801 |
| 9 | Centrado | 0.00 | 4798.00 | -5679.508 | 100.175 | 158.801 |
| 10 | Suave Derecha | −2.40 | 4795.60 | -5679.508 | 100.175 | 98.801 |
| 11 | Suave Derecha | −2.40 | 4795.60 | -5679.508 | 100.175 | 128.801 |
| 12 | Suave Derecha | −2.40 | 4795.60 | -5679.508 | 100.175 | 158.801 |
| 13 | Duro Derecha | −4.80 | 4793.20 | -5679.508 | 100.175 | 98.801 |
| 14 | Duro Derecha | −4.80 | 4793.20 | -5679.508 | 100.175 | 128.801 |
| 15 | Duro Derecha | −4.80 | 4793.20 | -5679.508 | 100.175 | 158.801 |
Resultados
| Modelo | Successful Runs | Collisions | Lane Inv. | Speed (km/h) | Mean Lateral Error (m) |
|---|---|---|---|---|---|
| Burbuja | 28/30 (93.3%) | 0.00 | 4.93 | 76.78 | 0.283 |
| DAgger 50% | 30/30 (100%) | 0.00 | 26.07 | 61.10 | 0.427 |
| Noise 50% | 30/30 (100%) | 0.00 | 6.93 | 65.95 | 0.199 |
Discusión
Los resultados obtenidos mantienen las tendencias observadas previamente en el Test 1, aunque las diferencias entre modelos son ahora más evidentes. Burbuja continúa siendo el modelo más rápido, pero pierde robustez en un escenario con mayor cantidad de curvas y perturbaciones iniciales más severas. DAgger (50%) conserva una tasa de éxito del 100 %, aunque presenta el mayor número de invasiones de carril y el mayor error lateral medio, indicando un seguimiento menos preciso de la trayectoria. Por su parte, Noise Injection (50%) también alcanza un 100 % de recorridos exitosos y obtiene el menor error lateral, confirmando una mayor precisión durante el seguimiento de la ruta ideal.
Aunque esta evaluación corresponde únicamente a una prueba rápida sobre un recorrido corto, los resultados sugieren que Town11 constituye un escenario más discriminante que Town02, permitiendo evidenciar con mayor claridad las fortalezas y limitaciones de cada estrategia de entrenamiento. Estos resultados motivan realizar el Test 1 completo en Town11 utilizando el mismo protocolo experimental empleado anteriormente.