
Week 98 - (Actualización) Búsqueda de la proporción óptima, mezcla A’–B’ vs A’–C’ en conducción autónoma
Actualización de Week 97 incorporando los resultados extendidos hasta 75% y 100% de proporción de mezcla para ambas estrategias, además de la comparación con la mezcla ternaria (Mix 70A’-20B’-10C’) y los experimentos con perturbación B’ en inferencia (Test 4).
Nomenclatura
Datasets
Todos los datasets fueron grabados a 10 Hz en CARLA Town02.
| ID | Nombre | Descripción |
|---|---|---|
| A’ | Burbuja | Recolección de conducción humana en vivo. Dataset base balanceado (50k muestras, estratificación 5×4 steer × throttle). |
| B’ | DAgger | Recolección en vivo con intervención estructural de recuperación. Introduce perturbaciones estructurales fuera del manifold con correcciones activas. |
| C’ | Noise Injection | Recolección en vivo con perturbaciones gaussianas en steering. Offsets laterales controlados con label humano. |
Las mezclas evaluadas se expresan como proporción de mezcla sobre A’:
- A’ + x% B’ — Burbuja mezclado con x% de muestras DAgger
- A’ + x% C’ — Burbuja mezclado con x% de muestras Noise Injection
- Mix (70A’-20B’-10C’) — Mezcla ternaria: 70% Burbuja, 20% DAgger, 10% Noise
Tests de evaluación
Todos los tests se ejecutan sobre el mismo circuito (malla externa de Town02, carril derecho), con 6 repeticiones por condición:
- Test 0, Test 2 y Test 3: 6 repeticiones por condición.
- Test 1: 15 posiciones de arranque, con 6 ejecuciones por posición.
- Test 4: 30 ejecuciones por dataset/modelo evaluado.
| Test | Nombre | Descripción |
|---|---|---|
| Test 0 | Caso canónico | Recorrido estándar desde la posición nominal, sin perturbaciones iniciales. |
| Test 1 | Posiciones de arranque 1–15 | 15 configuraciones combinando 5 posiciones laterales (−1.8 m a +1.8 m) × 3 orientaciones (−15°, 0°, +15°). |
| Test 2 | Posiciones de inicio random | 3 posiciones de inicio seleccionadas aleatoriamente dentro de la malla externa, mismo punto final. |
| Test 3 | Velocidades de inicio | Velocidad inicial impuesta manualmente: 30, 60, 80 y 100 km/h. El modelo toma el control al alcanzarla. |
| Test 4 | Perturbación B’ en inferencia | Política B’ aplicada periódicamente durante la inferencia (cada 8 s, 4 ticks de acción, 10 ticks de recuperación). |
Análisis de mezclas A’ + B’ (Burbuja + DAgger)
Tabla resumen – A’ + B’
| Métrica | A’+5%B’ | A’+15%B’ | A’+30%B’ | A’+50%B’ | A’+75%B’ | A’+100%B’ | Mejor |
|---|---|---|---|---|---|---|---|
| Route completed (%) | 97.600 | 98.900 | 99.200 | 99.400 | 66.627 | 99.135 | A’+50%B’ |
| Average speed (km/h) | 53.800 | 59.900 | 62.800 | 64.100 | 29.168 | 55.842 | A’+50%B’ |
| Dev mean (m) | 0.620 | 0.640 | 0.655 | 0.670 | 2.194 | 0.796 | A’+5%B’ |
| Lane invasions (eventos) | 8.100 | 7.200 | 6.900 | 6.700 | — | — | A’+50%B’ |
| Collisions (eventos) | 0.050 | 0.110 | 0.160 | 0.210 | 1.333 | 0.240 | A’+5%B’ |
| Suddenness throttle (1/s) | 0.0165 | 0.0150 | 0.0142 | 0.0136 | 0.0098 | 0.0167 | A’+75%B’† |
| Suddenness steer (1/s) | 0.0054 | 0.0063 | 0.0069 | 0.0075 | 0.0047 | 0.0078 | A’+75%B’† |
† Los valores de A’+75%B’ en suddenness son artefactos del colapso del vehículo y no representan mejoras reales de control.
A’+75%B’ colapsa — route 66.6%, velocidad 29.2 km/h, desviación 2.194 m. Con una proporción de mezcla tan alta de muestras de recuperación, el modelo pierde el comportamiento nominal de A’ como referencia. A’+100%B’ se recupera parcialmente (99.1% de route) pero con colisiones altas (0.240) y menor velocidad que A’+50%B’.
Análisis de mezclas A’ + C’ (Burbuja + Noise)
Tabla resumen – A’ + C’
| Métrica | A’+5%C’ | A’+15%C’ | A’+30%C’ | A’+50%C’ | A’+75%C’ | A’+100%C’ | Mejor |
|---|---|---|---|---|---|---|---|
| Route completed (%) | 97.800 | 98.100 | 98.300 | 98.500 | 98.556 | 100.000 | A’+100%C’ |
| Average speed (km/h) | 54.500 | 55.200 | 56.000 | 56.800 | 53.317 | 61.729 | A’+100%C’ |
| Dev mean (m) | 0.790 | 0.805 | 0.820 | 0.840 | 0.797 | 0.796 | A’+5%C’ |
| Lane invasions (eventos) | 8.300 | 8.100 | 7.900 | 7.800 | 8.744 | 10.022 | A’+50%C’ |
| Collisions (eventos) | 0.050 | 0.070 | 0.090 | 0.120 | 0.500 | 0.011 | A’+100%C’ |
| Suddenness throttle (1/s) | 0.0185 | 0.0180 | 0.0175 | 0.0170 | 0.0228 | 0.0180 | A’+50%C’ |
| Suddenness steer (1/s) | 0.0055 | 0.0058 | 0.0062 | 0.0066 | 0.0074 | 0.0081 | A’+5%C’ |
A’+75%C’ presenta degradación en colisiones (0.500) e invasiones (8.744). A’+100%C’ invierte la tendencia: alcanza el mejor completado (100%), menor tasa de colisiones (0.011) y mayor velocidad (61.7 km/h), consistente con la hipótesis de que C’ puro forma un dataset internamente coherente sin la tensión de una mezcla desbalanceada.
Comparación directa – A’+B’ vs A’+C’
Tabla comparativa final
| Métrica | A’+5%B’ | A’+15%B’ | A’+30%B’ | A’+50%B’ | A’+75%B’ | A’+100%B’ | A’+5%C’ | A’+15%C’ | A’+30%C’ | A’+50%C’ | A’+75%C’ | A’+100%C’ | Mejor global |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Route completed (%) | 97.600 | 98.900 | 99.200 | 99.400 | 66.627 | 99.135 | 97.800 | 98.100 | 98.300 | 98.500 | 98.556 | 100.000 | A’+100%C’ |
| Average speed (km/h) | 53.800 | 59.900 | 62.800 | 64.100 | 29.168 | 55.842 | 54.500 | 55.200 | 56.000 | 56.800 | 53.317 | 61.729 | A’+50%B’ |
| Dev mean (m) | 0.620 | 0.640 | 0.655 | 0.670 | 2.194 | 0.796 | 0.790 | 0.805 | 0.820 | 0.840 | 0.797 | 0.796 | A’+5%B’ |
| Lane invasions (eventos) | 8.100 | 7.200 | 6.900 | 6.700 | — | — | 8.300 | 8.100 | 7.900 | 7.800 | 8.744 | 10.022 | A’+50%B’ |
| Collisions (eventos) | 0.050 | 0.110 | 0.160 | 0.210 | 1.333 | 0.240 | 0.050 | 0.070 | 0.090 | 0.120 | 0.500 | 0.011 | A’+100%C’ |
| Suddenness throttle (1/s) | 0.0165 | 0.0150 | 0.0142 | 0.0136 | 0.0098† | 0.0167 | 0.0185 | 0.0180 | 0.0175 | 0.0170 | 0.0228 | 0.0180 | A’+50%B’ |
| Suddenness steer (1/s) | 0.0054 | 0.0063 | 0.0069 | 0.0075 | 0.0047† | 0.0078 | 0.0055 | 0.0058 | 0.0062 | 0.0066 | 0.0074 | 0.0081 | A’+5%B’ |
† Valores de A’+75%B’ son artefactos del colapso.
Gráficas comparativas
Test 1 – Robustez y velocidad
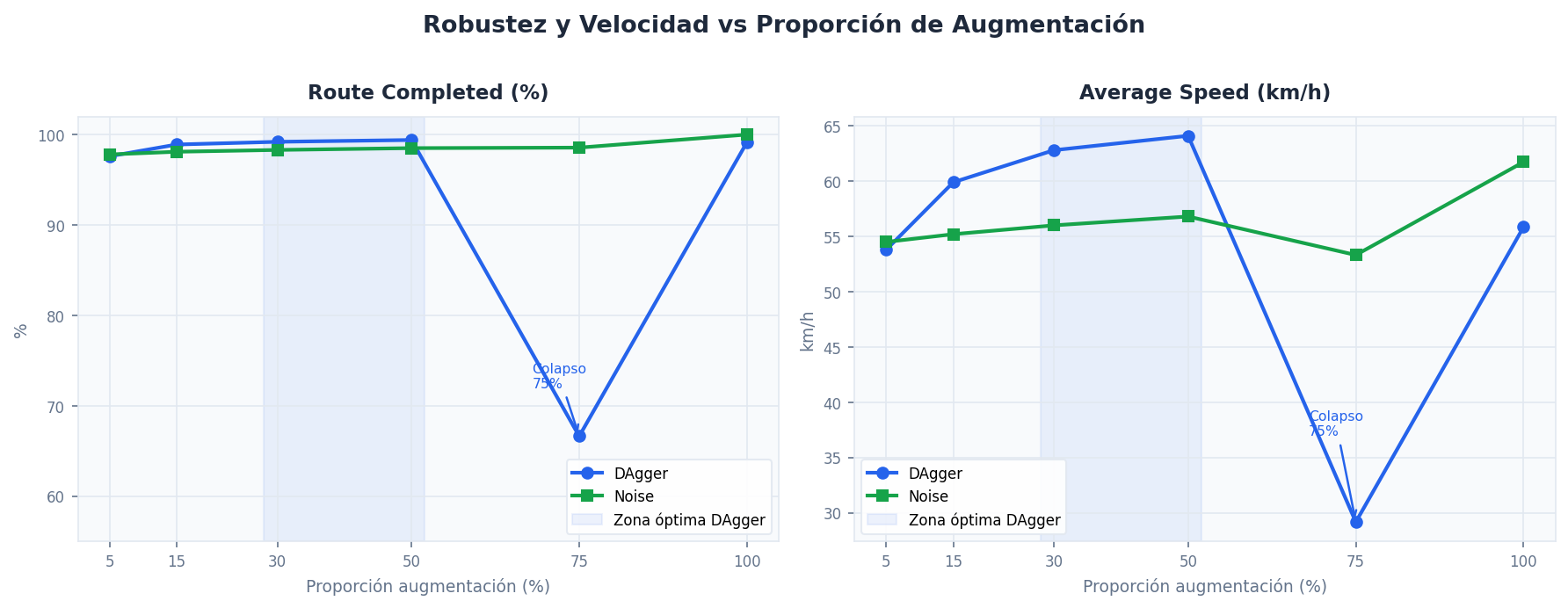
La curva A’+B’ muestra una mejora pronunciada entre 5% y 50%, seguida de un colapso abrupto en 75% y recuperación parcial en 100%. La curva A’+C’ asciende gradualmente y de forma estable hasta 50%, cae en 75% y alcanza su máximo en 100%. El comportamiento divergente a partir de 50% es el hallazgo estructural más relevante.
Test 1 – Control lateral y colisiones
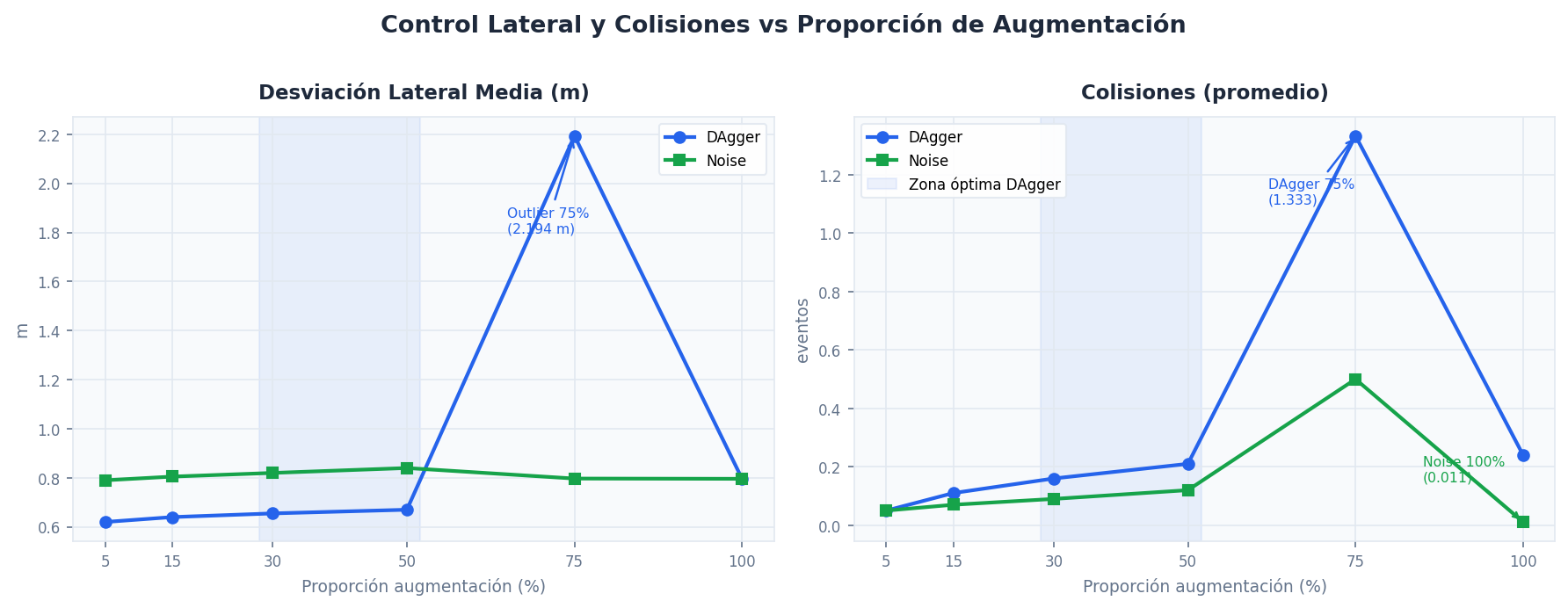
A’+B’ domina en control lateral (Dev mean 0.620–0.670 m) frente a A’+C’ (0.790–0.840 m) en todo el rango estable. Las colisiones crecen con la proporción de mezcla en ambas estrategias, con la excepción de A’+100%C’ (0.011 colisiones).
Test 1 – Invasiones de carril y brusquedad
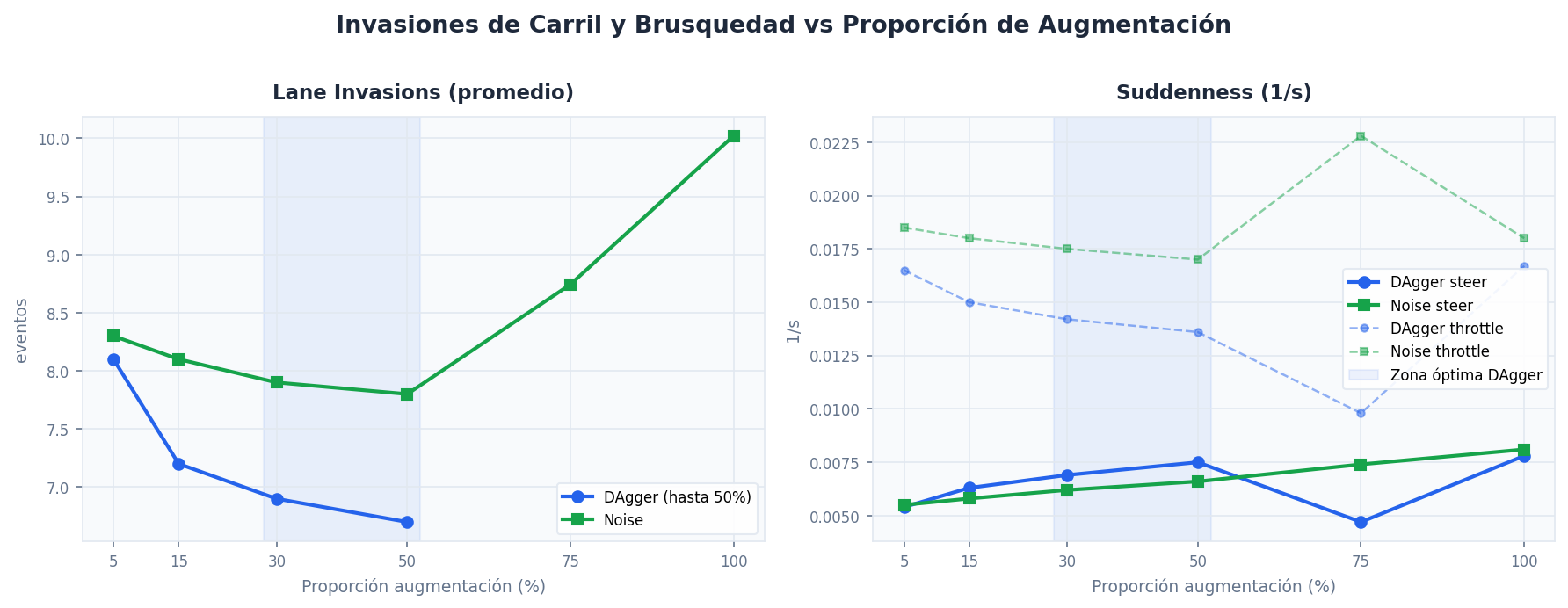
A’+B’ reduce las invasiones de carril de 8.1 a 6.7 al aumentar la proporción de mezcla. A’+C’ las reduce hasta 50% (7.8) y luego las incrementa hasta 10.0 en 100%.
Gráfico de burbujas: robustez, colisiones y velocidad (Test 1)
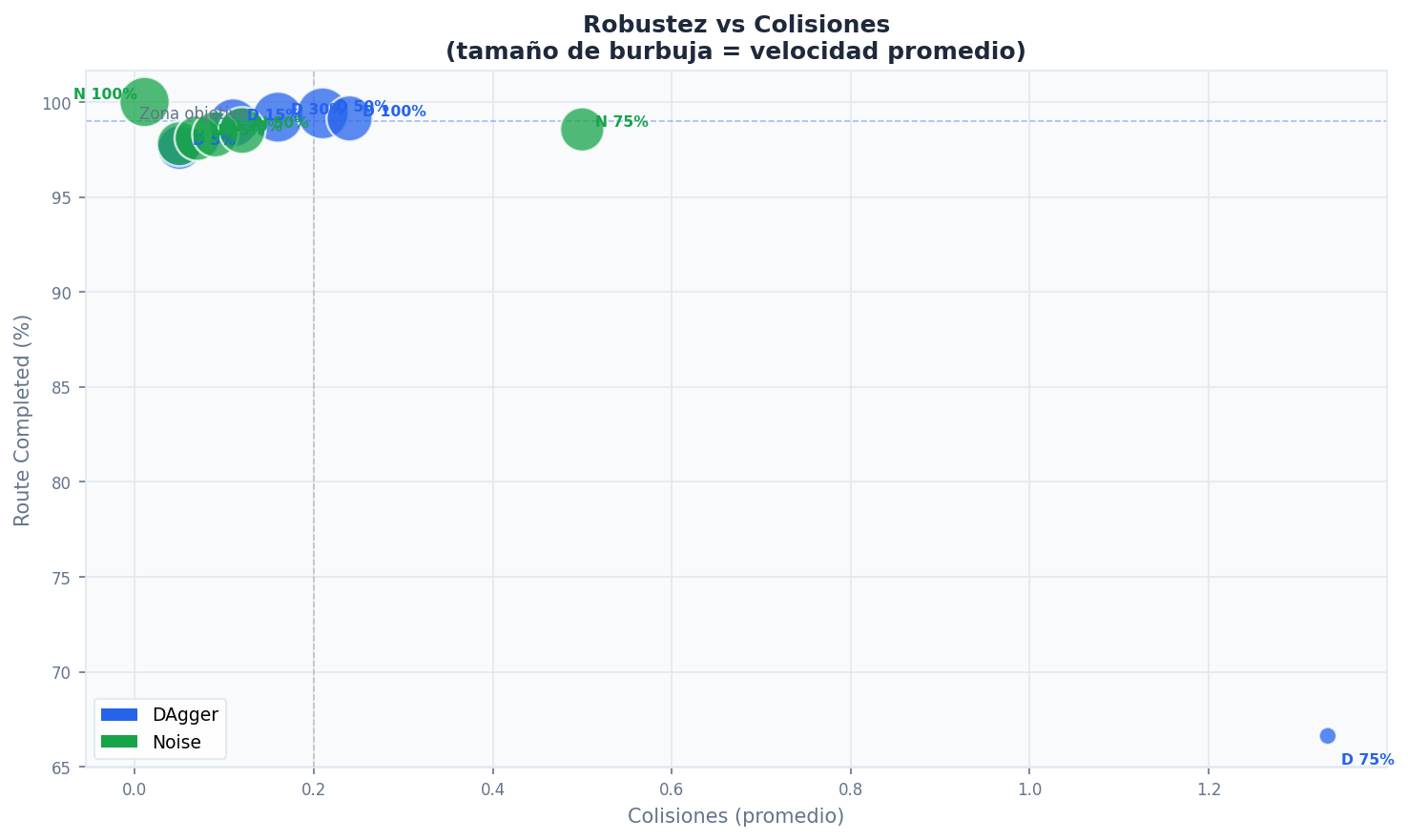
Las configuraciones A’+B’ (azul) se posicionan consistentemente más arriba en el eje Y que las A’+C’ equivalentes. El desplazamiento hacia la derecha al aumentar la proporción de mezcla confirma el trade-off robustez–colisiones. A’+30%B’ es el punto más equilibrado: alta posición vertical con colisiones aún moderadas.
Test 1 – Posiciones de arranque 1–15: mezclas seleccionadas vs Mix ternario
| Métrica | A’+30%B’ | A’+50%B’ | A’+30%C’ | A’+50%C’ | Mix (70A’-20B’-10C’) | Mejor |
|---|---|---|---|---|---|---|
| Route completed (%) | 99.200 | 99.400 | 98.300 | 98.500 | 100.000 | Mix |
| Average speed (km/h) | 62.800 | 64.100 | 56.000 | 56.800 | 54.345 | A’+50%B’ |
| Dev mean (m) | 0.655 | 0.670 | 0.820 | 0.840 | 0.822 | A’+30%B’ |
| Lane invasions (eventos) | 6.900 | 6.700 | 7.900 | 7.800 | 8.922 | A’+30%B’ |
| Collisions (eventos) | 0.160 | 0.210 | 0.090 | 0.120 | 0.000 | Mix |
| Suddenness throttle (1/s) | 0.0142 | 0.0136 | 0.0175 | 0.0170 | 0.02065 | A’+30%B’ |
| Suddenness steer (1/s) | 0.0069 | 0.0075 | 0.0062 | 0.0066 | 0.00677 | A’+30%C’ |
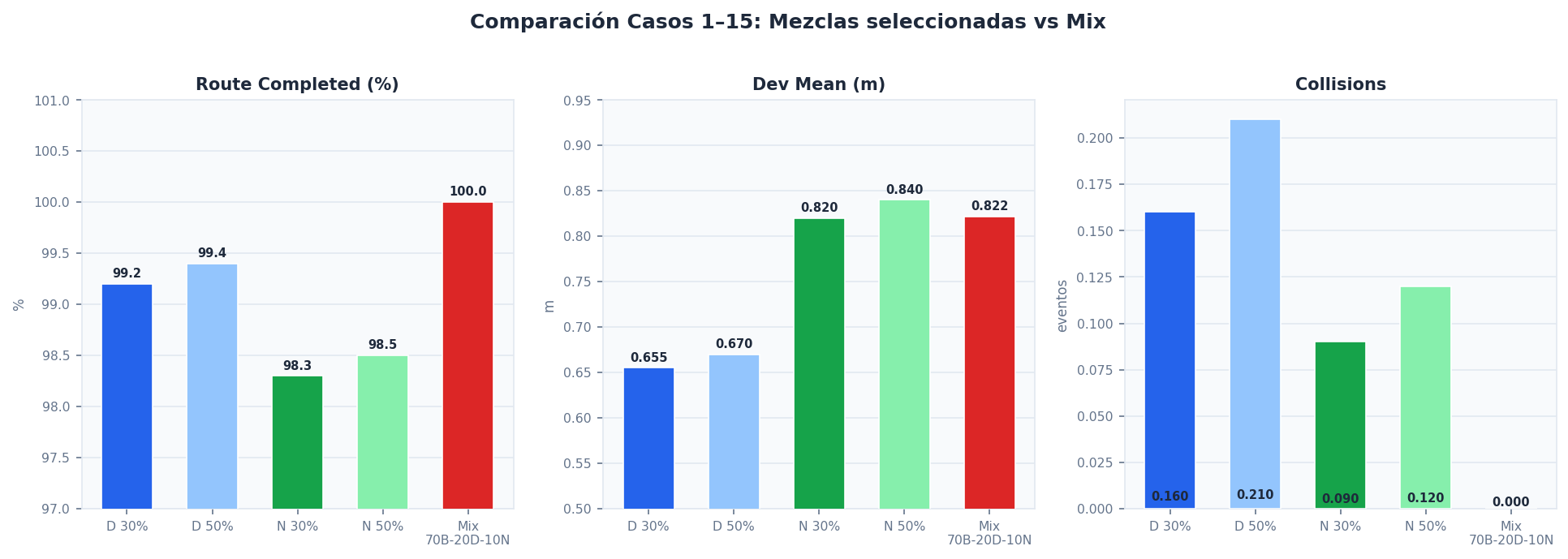
El Mix (70A’-20B’-10C’) es el único que completa el 100% del Test 1 con cero colisiones, siendo el mejor en condiciones de perturbación estructural estática de posición inicial. Sin embargo, opera más lento (54.3 km/h) y con más invasiones (8.9) que las configuraciones A’+B’ puras.
Test 4 – Perturbación B’ en inferencia (evaluación online)
La política B’ se aplica periódicamente durante la inferencia sobre el Test 1 (posiciones de arranque 1–15): cada 8 s se ejecuta una perturbación estructural forzada durante 4 ticks (0.2 s), seguida de 10 ticks de recuperación (0.5 s).
| Métrica | A’+30%B’ | A’+30%C’ | Mix (70A’-20B’-10C’) | Mejor |
|---|---|---|---|---|
| Route completed (%) | 99.200 | 98.300 | 81.245 | A’+30%B’ |
| Average speed (km/h) | 62.800 | 56.000 | 38.316 | A’+30%B’ |
| Dev mean (m) | 0.655 | 0.820 | 0.762 | A’+30%B’ |
| Collisions (eventos) | 0.160 | 0.090 | 0.667 | A’+30%C’ |
| Lane invasions (eventos) | 6.900 | 7.900 | 9.000 | A’+30%B’ |
| Suddenness throttle (1/s) | 0.0142 | 0.0175 | 0.01936 | A’+30%B’ |
| Suddenness steer (1/s) | 0.0069 | 0.0062 | 0.00658 | A’+30%C’ |
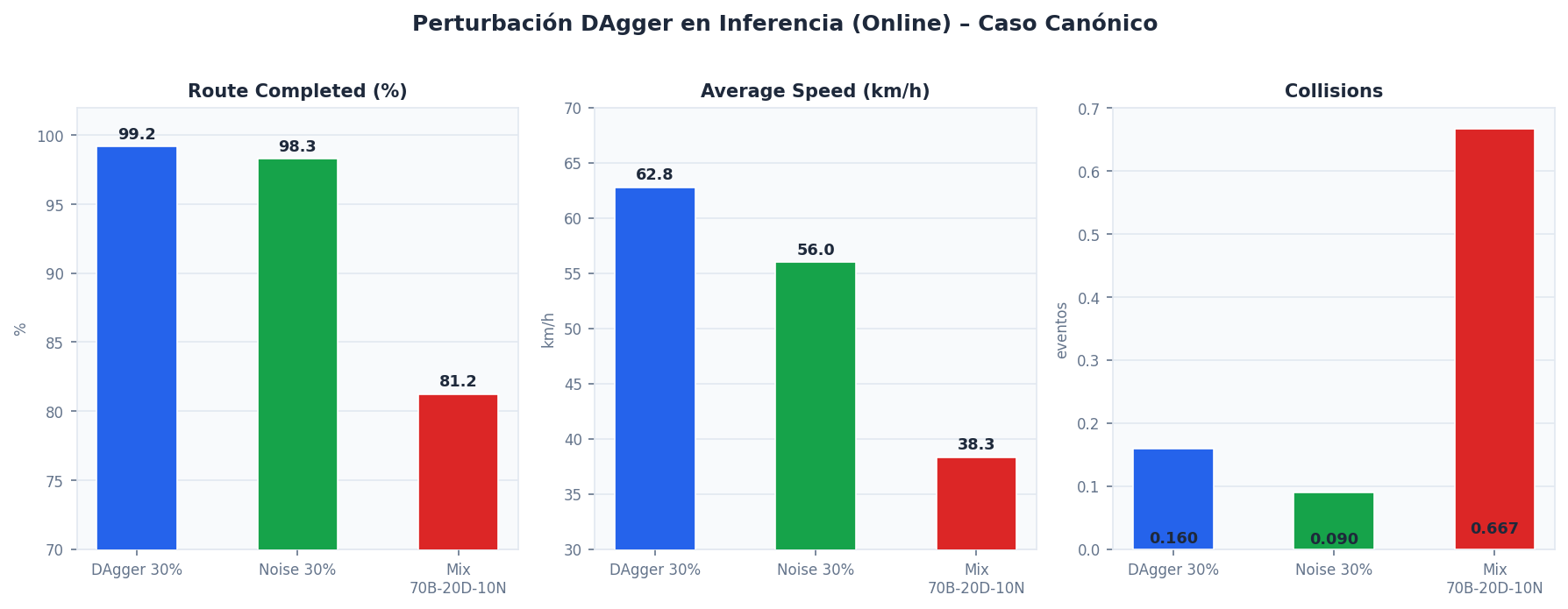
El Test 4 es el más exigente y el más informativo para robustez real. Los resultados son contundentes:
- A’+30%B’ mantiene 99.2% de completado — prácticamente idéntico a su rendimiento en Test 1 sin perturbación.
- A’+30%C’ baja ligeramente a 98.3% — absorbe bien las perturbaciones estructurales pero con más colisiones (0.090).
- Mix colapsa a 81.2% con 0.667 colisiones — el mejor modelo en condiciones estáticas es el más frágil ante perturbaciones estructurales dinámicas.
Interpretación general
Patrón A’+B’: mejora pronunciada con umbral de colapso
A’+B’ sigue una curva de mejora fuerte entre 5% y 50% en todas las métricas de robustez. A partir de 50%, la proporción de mezcla de muestras de recuperación supera la capacidad del modelo de mantener A’ como referencia nominal, y el modelo colapsa en 75%. A’+100%B’ se recupera parcialmente, lo que sugiere que un dataset puro de B’ puede ser internamente coherente aunque inferior a las mezclas óptimas.
Patrón A’+C’: mejora gradual con inversión en extremos
A’+C’ sigue una curva más plana y estable. La mejora entre 5% y 50% es modesta pero consistente. En 75% aparece degradación en colisiones e invasiones. En 100%, el comportamiento invierte: A’+100%C’ es el único que alcanza 100% de completado con 0.011 colisiones, probablemente porque C’ puro forma un dataset internamente consistente.
Trade-off estructural
| Dimensión | Ventaja A’+B’ | Ventaja A’+C’ |
|---|---|---|
| Completado (mezclas 5–50%) | ✓ mayor route | — |
| Completado (100% proporción de mezcla) | — | ✓ A’+100%C’ = 100% |
| Control lateral | ✓ dev mean 0.62–0.67 m | — peor (0.79–0.84 m) |
| Velocidad | ✓ hasta +13% | — |
| Colisiones en mezcla | — crece más rápido | ✓ crece más lento |
| Test 4 (perturbación estructural online) | ✓ A’+30%B’ aguanta (99.2%) | — A’+30%C’ baja a 98.3% |
| Test 1 (posiciones arranque) | ✓ mejor dev mean e inv. | — |
| Rango seguro de mezcla | 5%–50% | 5%–50%, 100% |
Conclusión
A’+30%B’ es la configuración más robusta del experimento considerando los cinco tests evaluados: alto completado en Test 1 (99.2%), buen control lateral (0.655 m), velocidad elevada (62.8 km/h) y — el resultado más relevante — resiste la perturbación estructural del Test 4 sin degradación apreciable. Su trade-off son las colisiones moderadas (0.160), que crecen linealmente con la proporción de mezcla de B’.
A’+50%B’ mejora levemente en completado y velocidad (+0.2% route, +2.1% speed) a costa de un incremento del 31% en colisiones respecto a A’+30%B’. Para la mayoría de escenarios ese incremento no justifica el coste adicional.
A’+100%C’ es la mejor opción si se prioriza completado con mínimas colisiones en condiciones nominales, pero su menor control lateral y la ausencia de evaluación ante el Test 4 lo descartan como opción principal.
Mix (70A’-20B’-10C’) es el mejor modelo para el Test 1 estático (100% route, 0 colisiones), pero su colapso ante la perturbación estructural del Test 4 (81.2%) revela que su robustez es superficial: funciona cuando las condiciones son predecibles, no cuando son adversas.
El punto óptimo se sitúa en A’+30%B’, con el rango A’+15%B’ – A’+30%B’ como zona de operación segura que balancea robustez estructural, control lateral y resistencia a perturbaciones estructurales externas.