Semana 13 y 14: Análisis del sensor LiDAR en CARLA
Durante las últimas semanas, se ha estado evaluando el sensor LiDAR en CARLA con el objetivo de analizar su fiabilidad y funcionamiento en diferentes escenarios.
Mallas de colisión
Para comenzar, se creó un mapa plano con una pared, permitiendo observar cómo el sensor LiDAR detecta las mallas de colisión de diversos objetos presentes en entornos naturales, como rocas, árboles y arbustos.
Los resultados han demostrado que el sensor LiDAR captura de manera bastante precisa la forma de los distintos objetos, lo que indica un buen nivel de fiabilidad en la detección de obstáculos.
Ejemplo SMF_TreePine_2
Imagen RGB
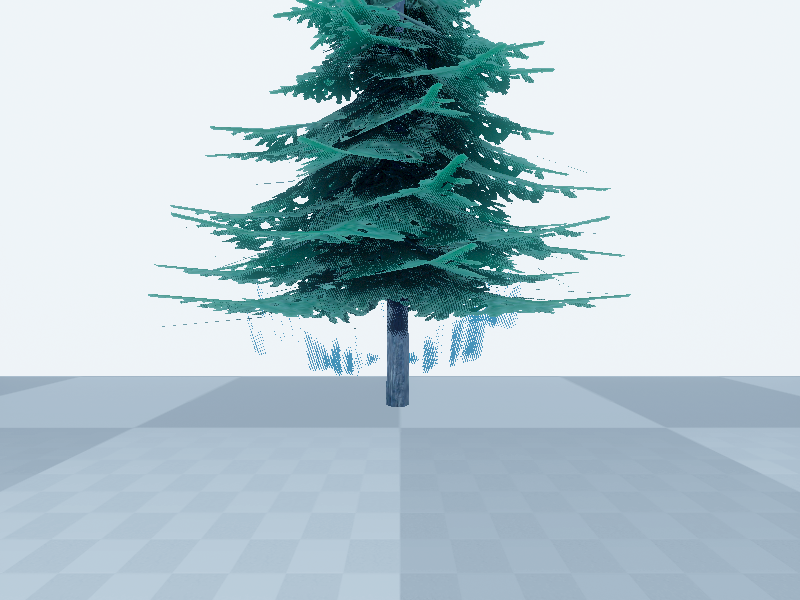
Segmentación Semántica

Sensor LiDAR
Caracterización del sensor LiDar
Usando el mismo mapa, se han analizado los distintos parámetros modificables del sensor LiDAR usando unos valores por defecto y modificancolos uno a uno:
- Channels: 32 canales
- Range: 100 m
- Points_per_second: 500.000 puntos
- Rotation_frecuency: 1 / delta Hz
- Upper_fov: 10º
- Lower_fov: -45º
- Noise_stddev: 0.05 m
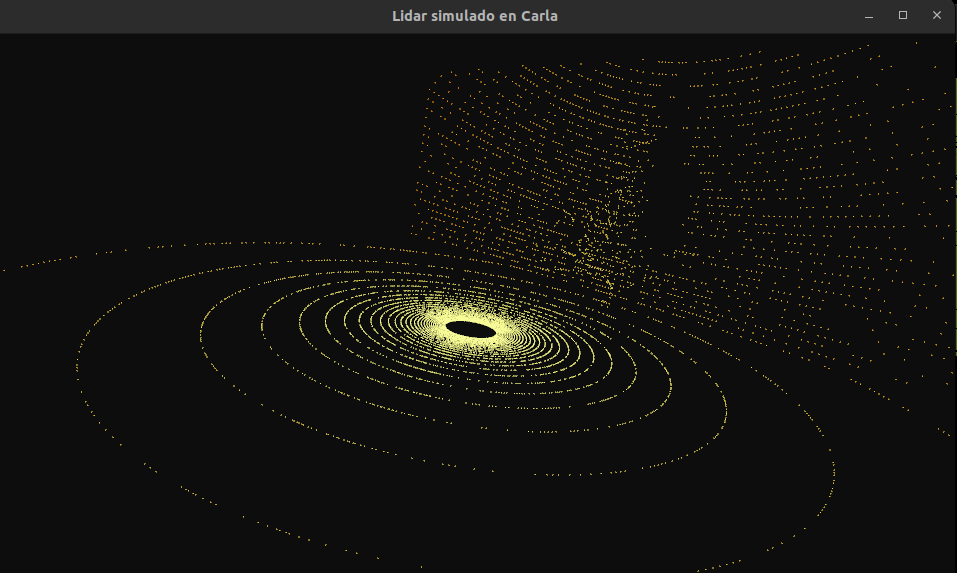
Base
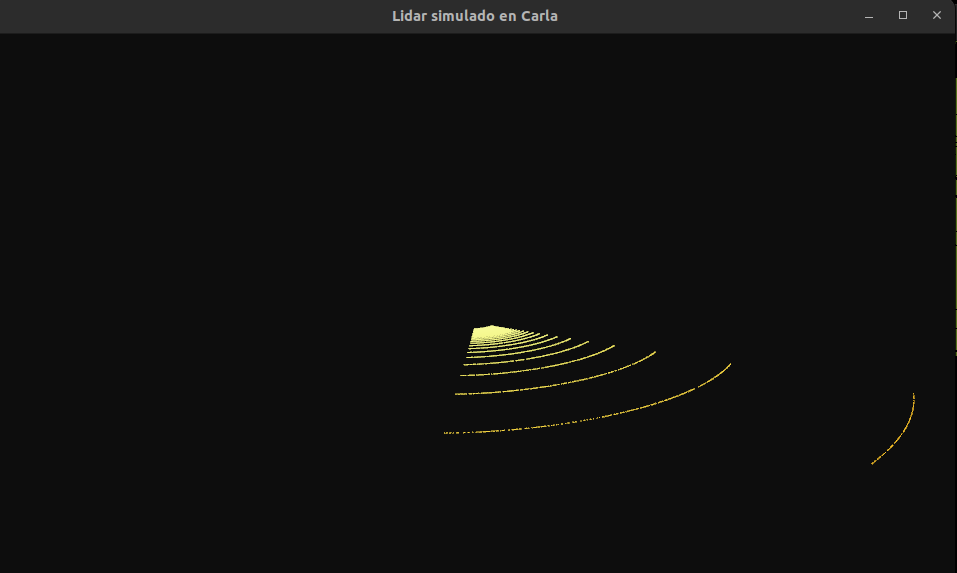
Channels
Este parámetro define el número de haces láser verticales del sensor. A mayor cantidad de canales, mayor será la densidad vertical de los puntos obtenidos.
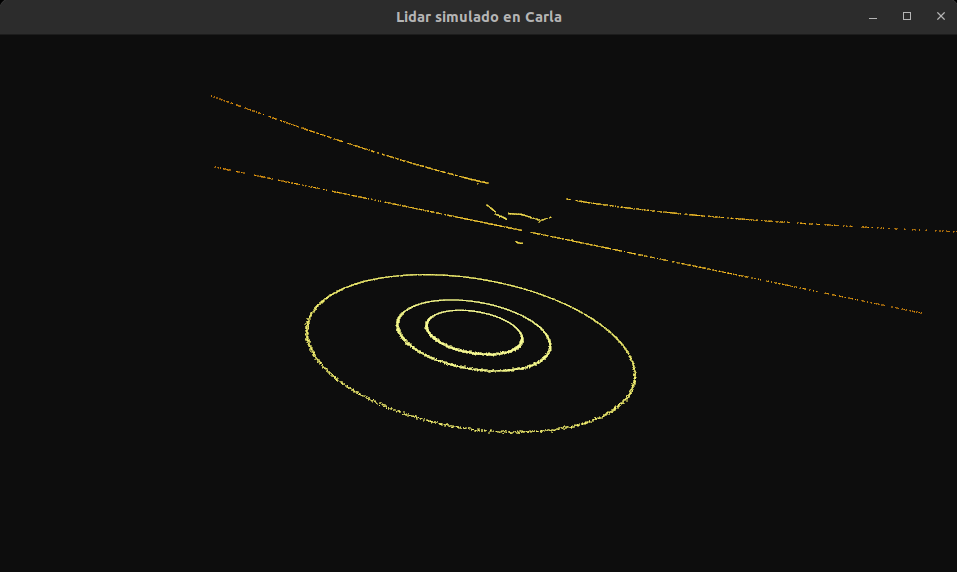
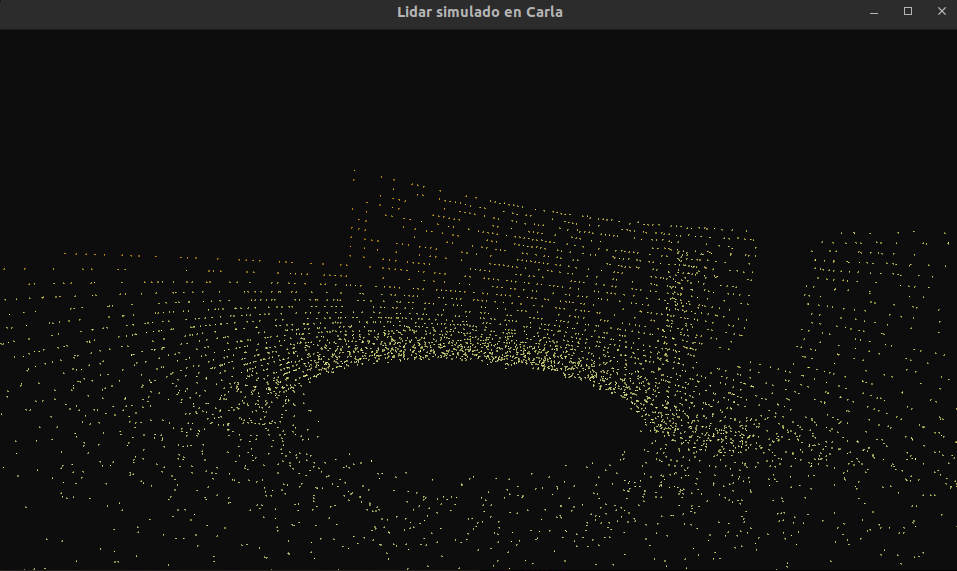
- Con un número bajo de canales, por ejemplo, 5, no es posible determinar con precisión la forma de los objetos en el entorno.
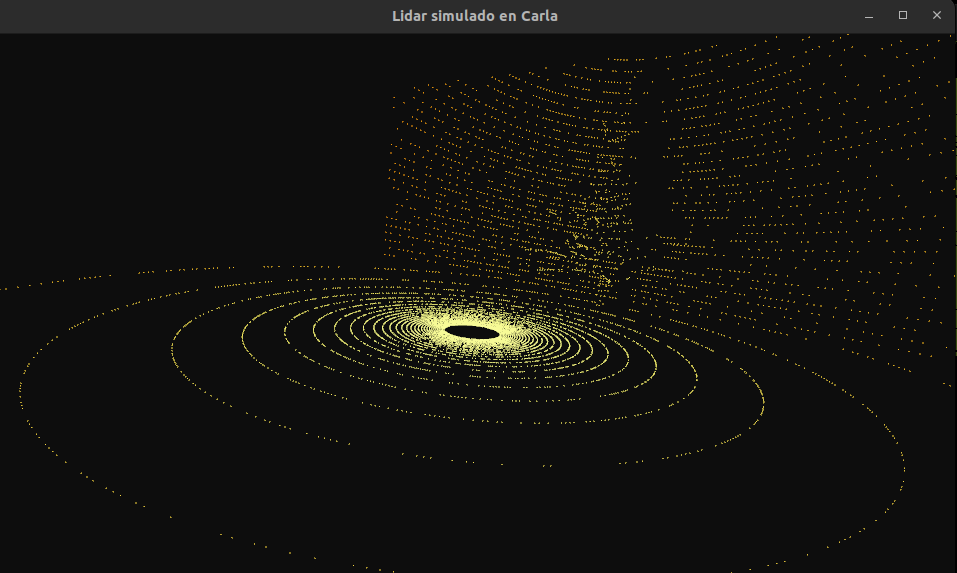
Ejemplo con 5 canales
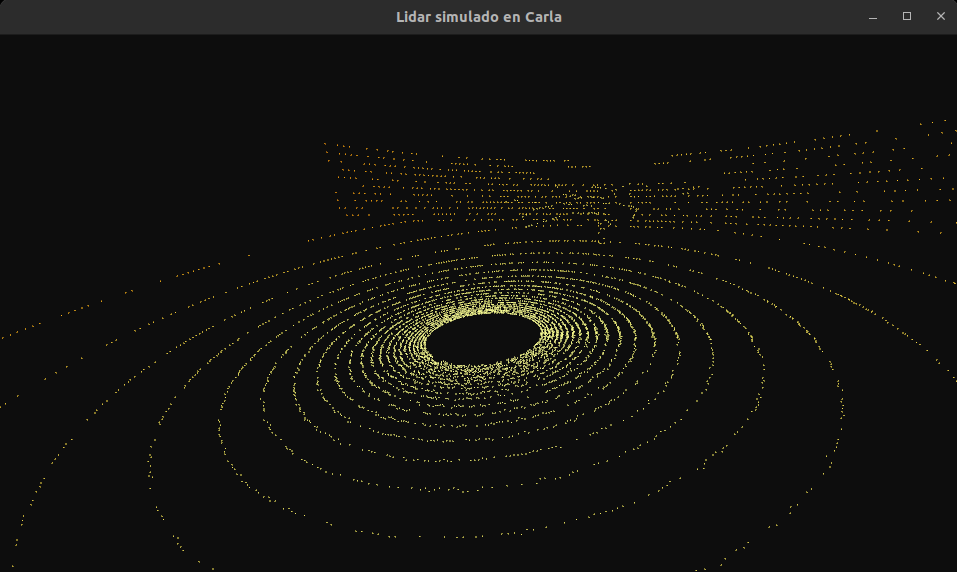
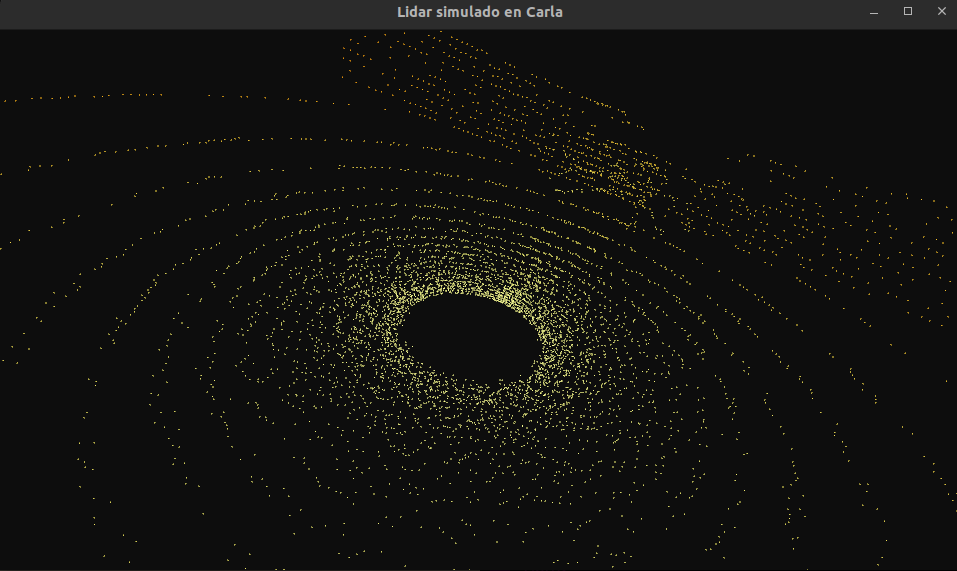
- Se ha observado que el mínimo recomendable para un análisis confiable es de 32 canales, ya que con esta cantidad los objetos pueden distinguirse con claridad.
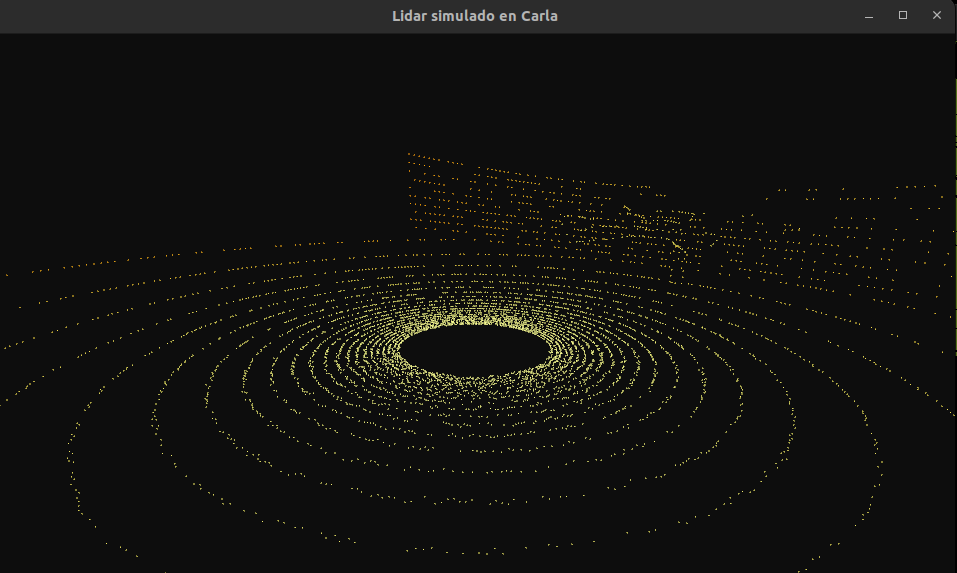
Ejemplo con 32 canales
- Es importante considerar el campo de visión vertical (FOV): los canales se distribuyen a lo largo de este rango, por lo que, si el FOV es muy amplio, los haces estarán más espaciados y será necesario aumentar el número de canales para mantener la resolución vertical.
Range
Define el rango máximo de detección del sensor, medido en metros.
- Un rango mayor permite detectar objetos más lejanos, aunque puede haber una pérdida de precisión en distancias extremas.
- Con un rango menor se mejora la calidad cercana y se reduciría el ruido.
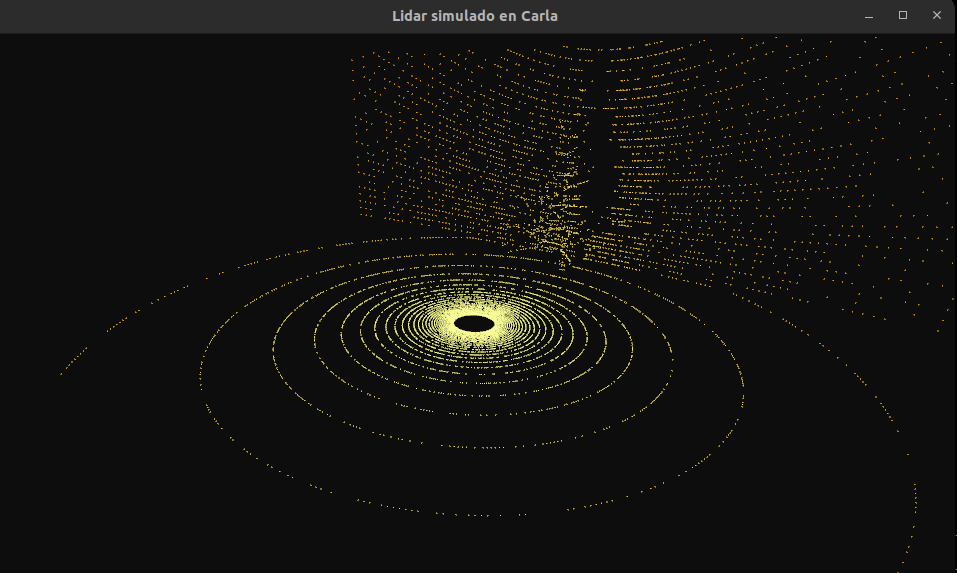
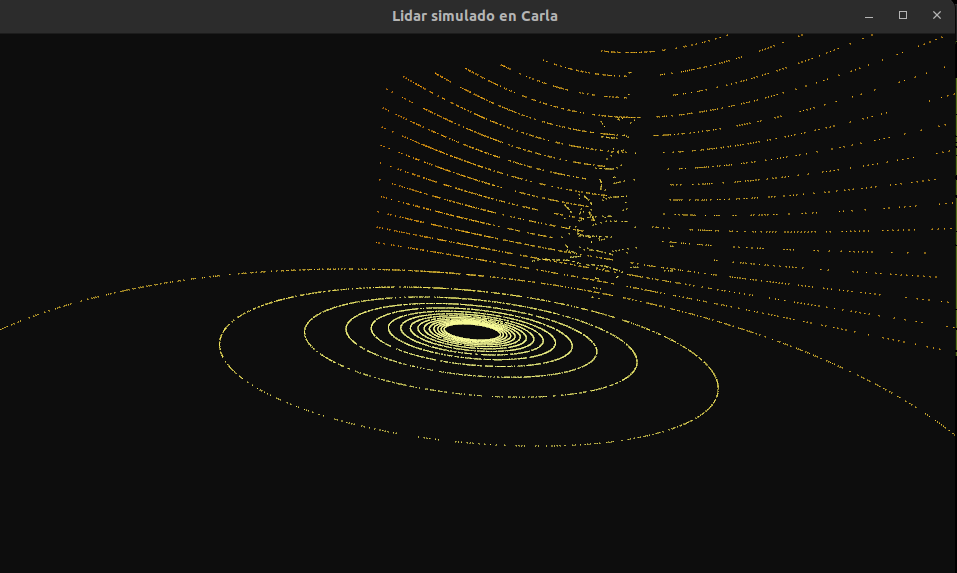
Points_per_second
Indica la cantidad de puntos generados por el sensor cada segundo.
- A mayor número de puntos, mayor será la densidad de la nube de puntos y, por lo tanto, el detalle de los objetos detectados.
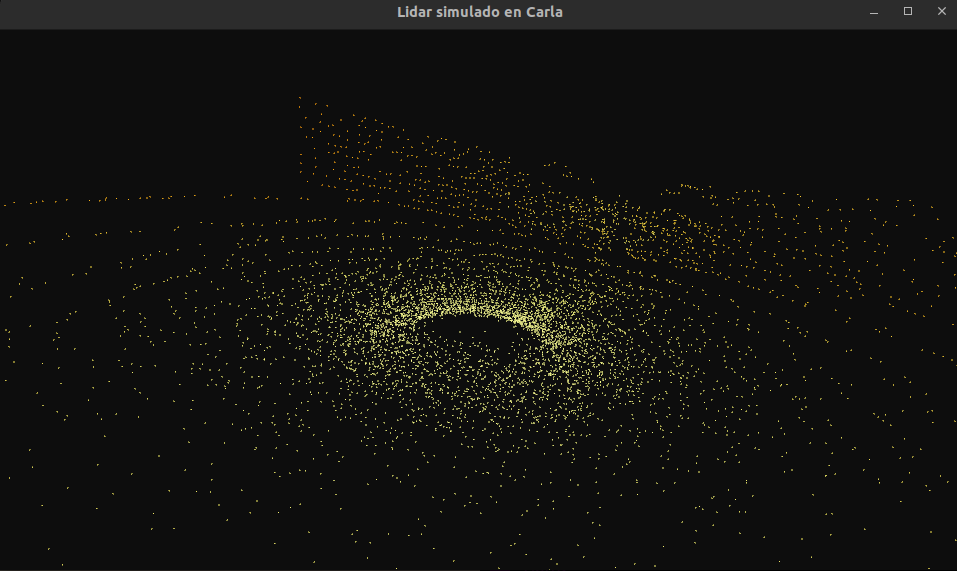
- Se ha determinado que el mínimo necesario para un análisis fiable es de 500.000 puntos por segundo.
- A partir de 5.000.000 de puntos por segundo, aunque se aumenten los valores, no se observan mejoras significativas en la calidad del escaneo.
- Este parámetro debe ajustarse en función del número de canales y el rango de detección, ya que: – Si hay muchos canales, los puntos se repartirán entre ellos, por lo que se necesitará una cantidad mayor de puntos por segundo para mantener la densidad. – Si el rango es amplio, se requerirá un mayor número de puntos para detectar objetos lejanos con precisión.
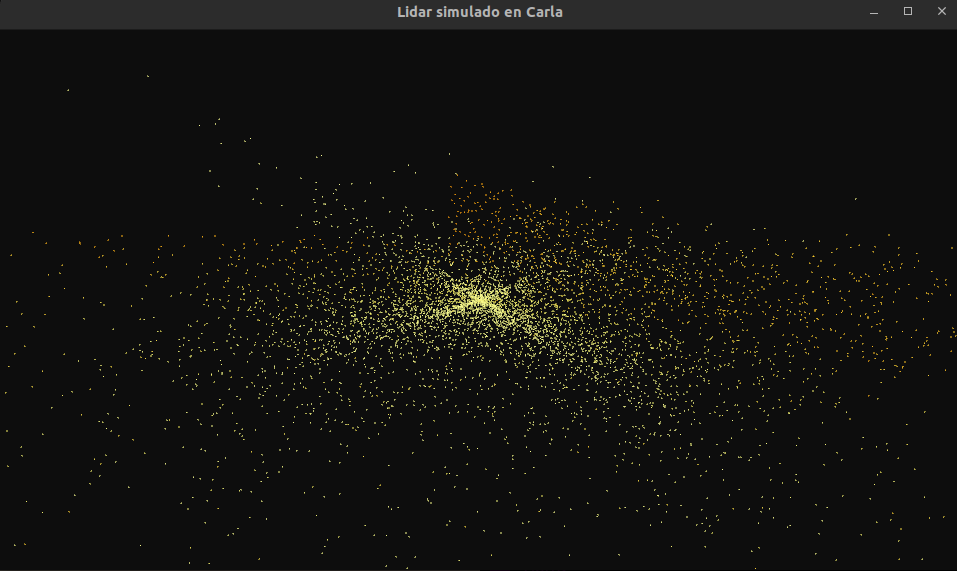
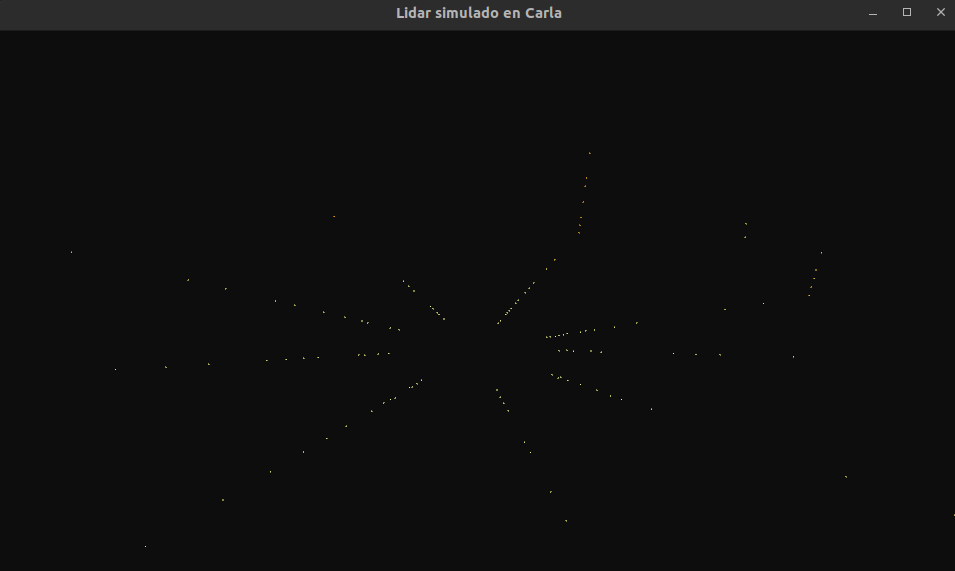
Ejemplo con 10.000 puntos
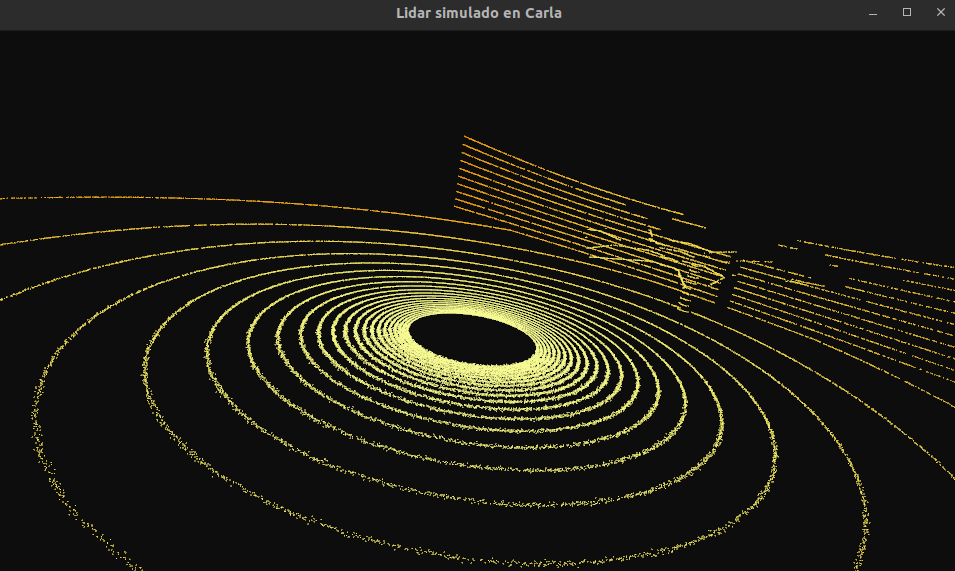
Ejemplo con 5.000.000 de puntos
Rotation_frecuency
Es la frecuencia de rotación del sensor, medida en Hz.
- Lo ideal es utilizar un valor basado en el delta (frecuencia dinámica) para garantizar una correcta visualización en cualquier ordenador, o por lo menos una frecuencia de 35 Hz.
Ejemplo con 35 Hz
- Si la frecuencia es demasiado baja, como por ejemplo 5 Hz, solo se captará una porción reducida del entorno en cada instante, dificultando la detección de objetos en tiempo real.
Ejemplo con 5 Hz
Upper_fov y lower_fov
Determinan el campo de visión vertical del sensor, medido en grados.
- Un FOV más amplio permite detectar objetos situados a mayor altura o más cerca del suelo.
- Sin embargo, hay que tener en cuenta que los canales se distribuyen a lo largo del FOV, por lo que un FOV muy grande con pocos canales generará una baja resolución vertical.
FOV de -45 a 45 grados con 64 canales
FOV de -45 a 45 grados con 32 canales
Noise_stddev
Representa el nivel de ruido gaussiano (desviación estándar), medido en metros.
- Afecta la posición de los puntos en la nube de puntos 3D, generando más dispersión a medida que aumenta el valor.
- Se ha determinado que con un ruido de 0.25 m todavía es posible distinguir objetos cercanos, pero los objetos lejanos comienzan a volverse más difíciles de identificar.
Ruido de 0.25 desde una distancia cercana
Ruido de 0.25 desde una distancia Lejana
Ruido de 0.25 desde una distancia Lejana
- A medida que el ruido aumenta, la detección de objetos se vuelve menos precisa.
Ruido de 1.00
Ruido de 10.00