
Semana 22: Mapa Ladera
Mapa Ladera
Este tipo de entorno plantea riesgos reales para la conducción autónoma como pendientes pronunciadas, vegetación densa, y caminos estrechos Con el objetivo de ampliar la variedad de escenarios disponibles para la generación de datasets, se ha comenzado a desarrollar un mapa inspirado en la ladera de una montaña. Este tipo de entorno presenta varios factores de riesgo reales para la conducción autónoma como pendientes pronunciadas y caminos estrechos.
En la imagen inferior puede observarse el mapa en su estado actual. La línea amarilla marca el recorrido que seguiría el vehículo autónomo durante las simulaciones:
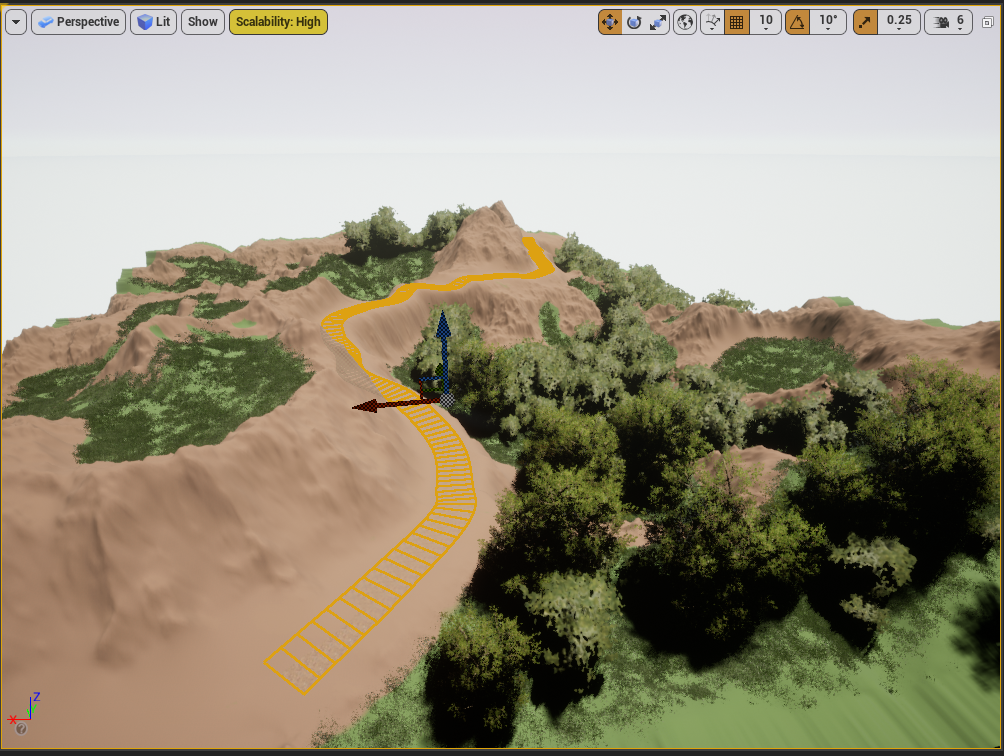
Actualmente, el mapa aún no está finalizado. Se ha incorporado vegetación como primer paso, pero está pendiente la inclusión de objetos como basura o restos orgánicos, que pueden suponer focos de incendio
Pintado de materiales sobre el terreno
Para evitar un paisaje visualmente plano, después de convertir el landscape en una static mesh, se ha aplicado Vertex Painting. Esto permite variar las texturas de forma dinámica sobre una misma malla. Se ha preparado un material con dos texturas base: hierba y tierra.
Explicación del Blueprint del material
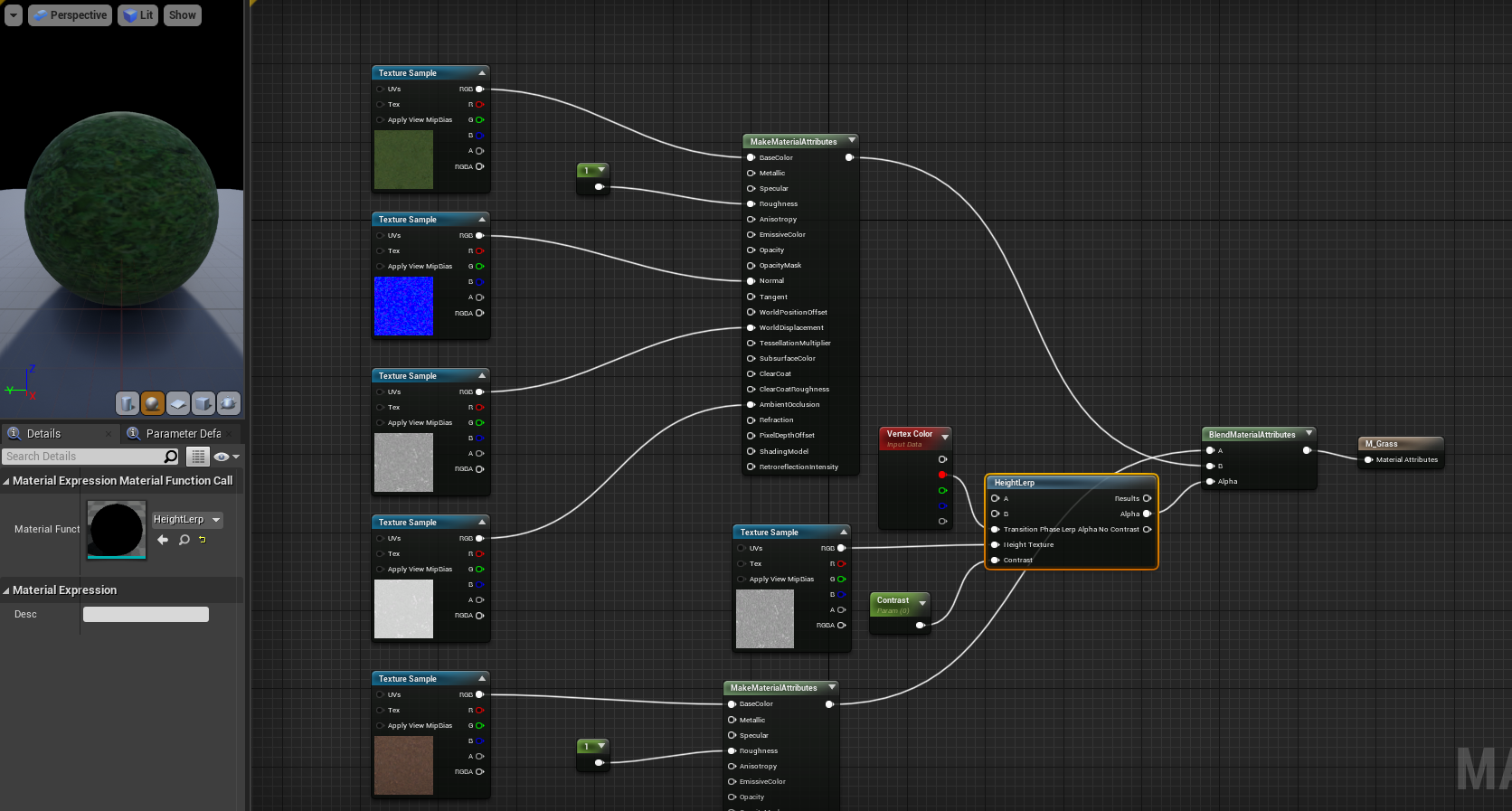
Los nodos principales utilizados son:
- Texture Sample: Carga las texturas de color, normales, rugosidad, etc. para cada material (tierra y hierba).
- MakeMaterialAttributes: Agrupa los parámetros físicos del material (color, rugosidad, normales, AO, etc.) para cada superficie.
- BlendMaterialAttributes: Mezcla dos materiales distintos. Este nodo necesita un valor
Alphapara decidir la proporción de cada uno. - HeightLerp: Controla el valor
Alphade mezcla en función de un mapa de alturas (Height Texture). Este método permite realizar transiciones suaves y naturales entre materiales según la elevación o zonas pintadas delvertex color. - Vertex Color: Permite usar los colores de los vértices pintados en el modo de
Vertex Paintpara definir áreas de mezcla entre los materiales. - Contrast: Ajusta la sensibilidad de la transición de mezcla (suaviza o endurece la zona de cambio).
Este sistema permite pintar manualmente zonas del mapa con un degradado natural entre tierra y hierba, aportando más realismo al entorno visual del simulador.
Avance
Ya que un compañero necesitaba que cada punto proporcionase información sobre su intensidad, se ha comenzado a trabajar en guardar este valor como parte del dataset LiDAR. Para ello, se ha optado por exportarlo utilizando el campo normals, al igual que con las etiquetas semánticas, ya que no existe un componente directo para ello en Open3D.
Actualmente, esta intensidad solo varía en función de la distancia, ya que se simula el comportamiento del LiDAR estándar de CARLA, donde todos los objetos comparten el mismo coeficiente de atenuación atmosférica (atmosphere_attenuation_rate).
Como mejora futura, sería interesante explorar cómo aplicar coeficientes de atenuación distintos según el tipo de material o superficie impactada, lo que permitiría una simulación más realista del comportamiento del sensor.