
Semana 6: RoadRunner
RoadRunner
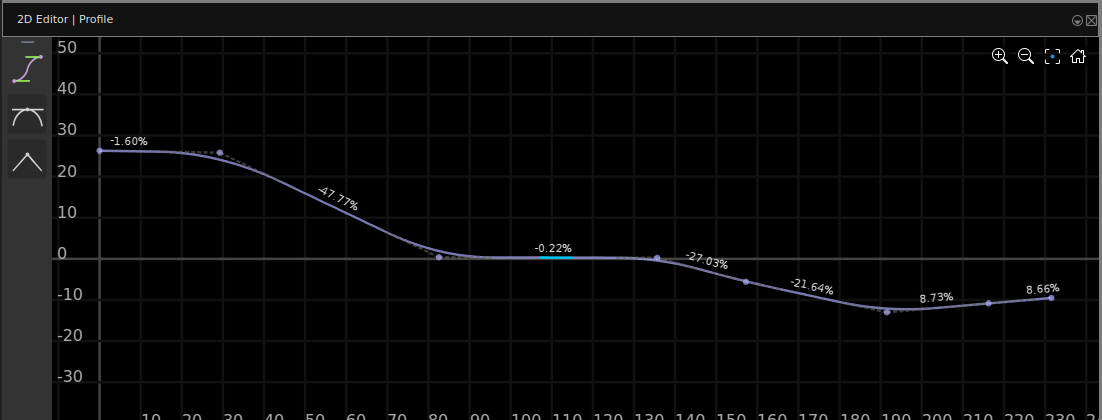
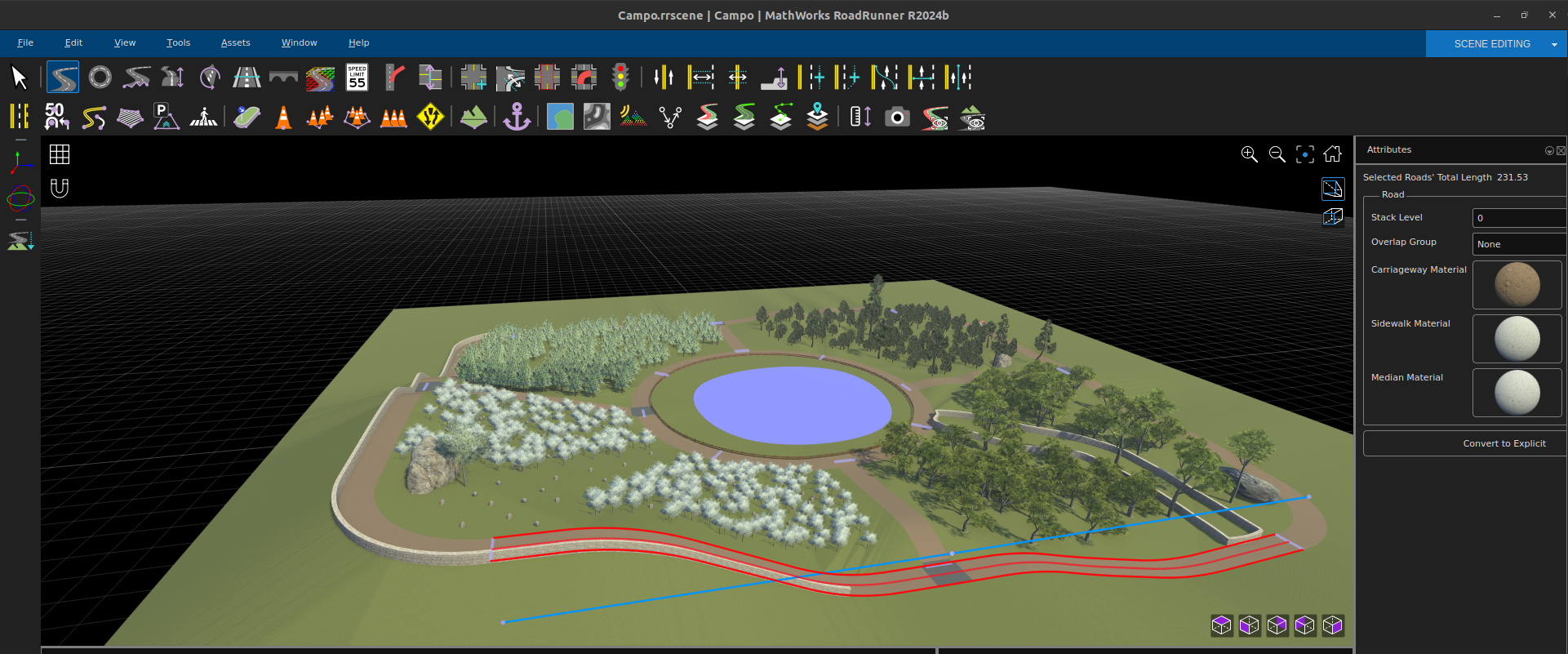
Debido a que se consiguió una licencia de RoadRunner se estuvo probando todas las funciones de este programa creando una carretera sencilla a la que se le puso la textura Dirt1 para simular un camino sin asfaltar al que se le fue modificando el terreno con el editor 2D para crear caminos mas irregulares con subidas y bajadas y no un camino recto, dividiendo las carreteras en varias puntos que se elevaban o descendian.
También se añadieron distintos elementos uno a uno con el Prop Point Tool, se agregaron vallas con el Prop Curve Tool y árboles, piedras y arbustos con el Prop Polygon Tool con distintas intesidades en diferentes partes del terreno creado por el Surface Tool.
Carla
Para importar dicho mapa a CARLA se hizo uso de los plugins de RoadRunner en CARLA, pero cuando se intentó importar, CARLA se detenía y no terminaba el proceso, por lo que se decidió limitar el uso de elementos extras para la decoración, consiguiendo que finalmente se importase.
Sensor LiDAR
Finalmente, se investigó como se podría añadir un sensor LiDAR a un vehículo en CARLA, viendose que en la biblioteca de Python de CARLA están disponibles varios tipos de camaras y sensores, entre ellos el LiDAR.