Evaluation of Smooth Driving Datasets in CARLA Towns 07 and 12
March 13, 2026
Analysis of two dataset construction approaches for imitation learning: balanced curves-only vs. augmented dataset including recovery examples
Following the systematic balancing study reported in Week 22, this week we initiated the construction of a new dataset focused on smooth routes in CARLA Towns 07 and 12. Two distinct approaches were developed and evaluated using a fixed architecture. This report details the dataset compositions, the behavioural outcomes of the trained agents, and outlines the next steps to improve performance, particularly the inclusion of DAgger recovery examples.
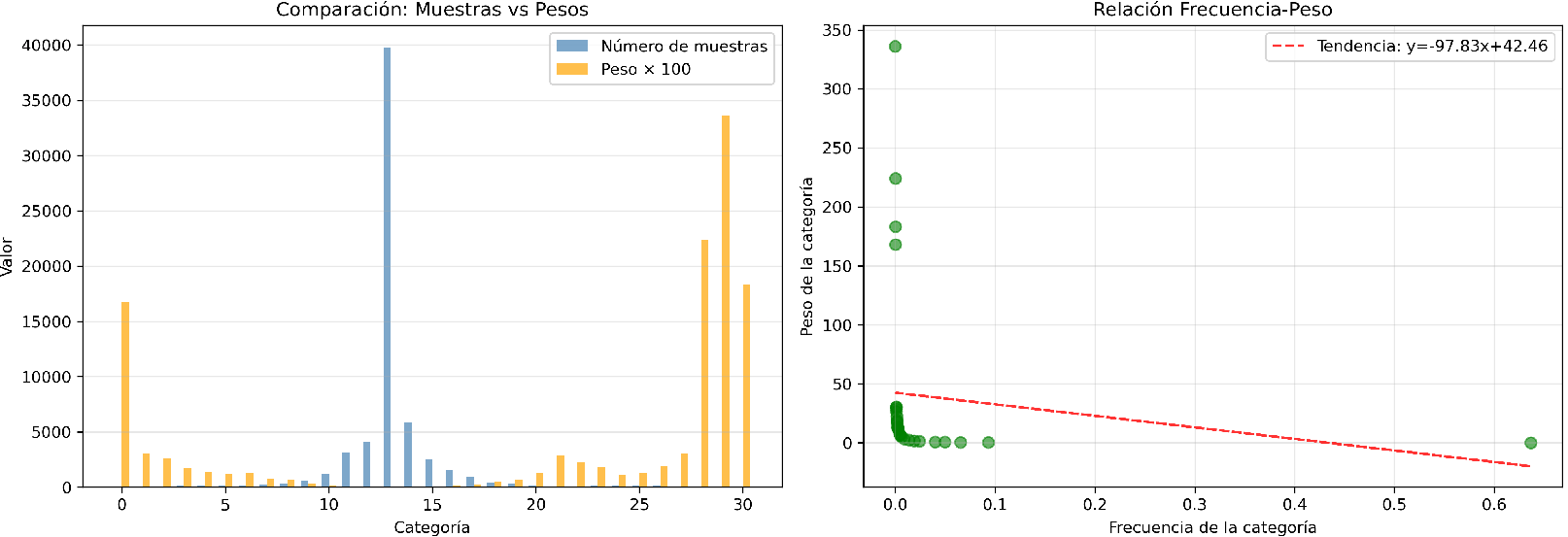
1. First Approach: Smooth Curves Only (Towns 07 & 12)
The initial dataset was composed exclusively of smooth driving segments from Town 07 and Town 12. The original distribution was heavily imbalanced towards straight driving. To address this, a weighted balancing technique was applied.

Behavioural Characteristics of the Agent:
- ✅ Centred driving without corrections (stable on straight sections).
- ❌ No recognition of smooth or sharp curves — the agent fails to turn.
- ❌ Does not consider road intersections.
Demonstration video: https://youtu.be/yniu2Y_1a7A
Interpretation: The model learned to drive straight but failed to generalise to any steering angle > 0°. Weighted balancing alone, without sufficient examples of turning manoeuvres, is insufficient for curve negotiation.
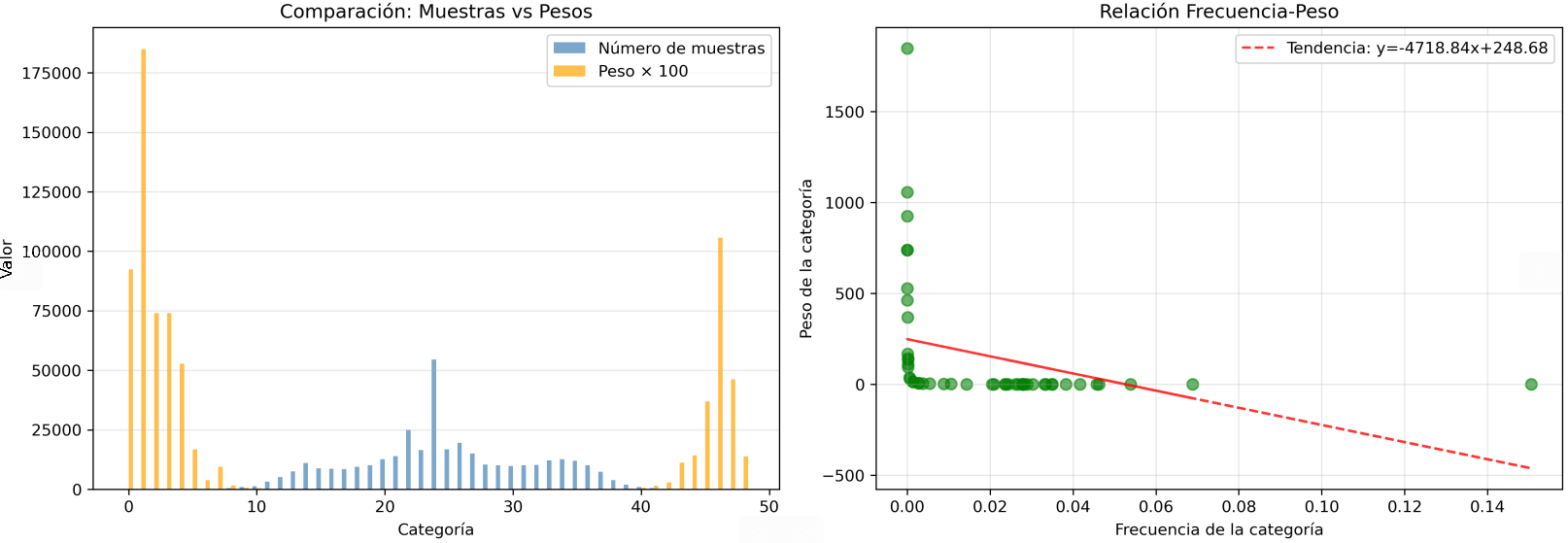
2. Second Approach: Augment Week 12 Dataset with New Town07/Town12 Data
The second approach combined the previous dataset (which already included some curves) with new images from Town 07 and Town 12. The goal was to increase the diversity of turning examples while retaining the original data.
Behavioural Characteristics of the Agent:
- ✅ Centred driving without corrections.
- ⚠️ Smooth turns are performed, but the system still gets confused and occasionally generates strong steering commands.
- ❌ Does not consider road intersections.
Demonstration video: https://youtu.be/S1-p23g03qw
Critical observation
This approach lacks DAgger (Dataset Aggregation) examples for lane recovery. The agent was never trained on how to return to the lane centre when it drifts, which explains the intermittent confusion and strong corrections.
SUMMARY OF FINDINGS – MARCH 13, 2026 (WEEK 24):
✅ Balanced curves-only dataset yields perfect straight driving but zero curve recognition.
✅ Augmented dataset enables some turns, but steering is inconsistent and intersections are ignored.
✅ The 1 s frame spacing (validated in Week 22) successfully prevents oscillatory behaviour.
❌ Both approaches lack DAgger recovery data — this is the primary cause of confusion when the vehicle deviates from the ideal path.
🔜 Upcoming: DAgger implementation, dataset refinement, and expansion to ~600k samples.
Next Steps (detailed):
During the week of March 14–20, we will begin collecting DAgger recovery examples by letting the agent drive and manually intervening when it leaves the lane centre. These interventions will be added to the training set. Simultaneously, we will expand the dataset with more curve radii and intersection turns, aiming for a total of ~500k–600k frames. The refined dataset will then be used to retrain both MobileNet and PilotNet for comparison.
— Armando Mateus, Robotics Lab URJC