Integración en Robotics Academy ejercicio grafo de visibilidad
Esta semana seguí avanzando en la implementación del ejercicio de Visibility Graph Navigation dentro de Robotics Academy.
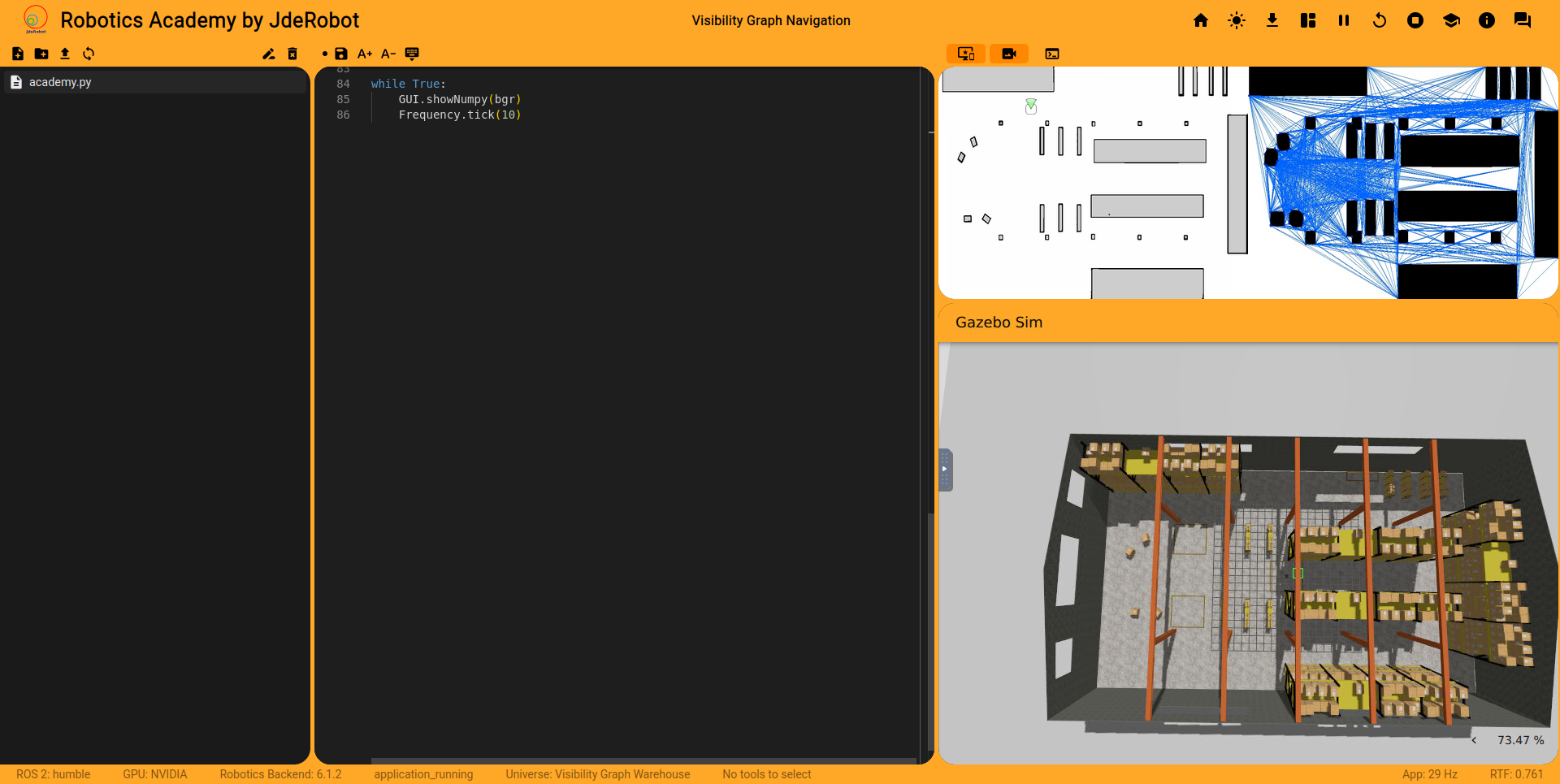
Estuve trabajando en la parte de visualización. Aquí la idea es ofrecer una interfaz con dos paneles: en el izquierdo se muestra el mapa original del almacén junto con la posición del robot en tiempo real, y en el derecho se puede mostrar un numpy array para depurar el código (mapa dilatado,la ruta planificada, etc).
En la siguiente imagen se muestra el mapa original y el grafo sobre el mapa dilatado:
Actualmente estamos trabajando en mejorar la localización del robot, además de otros aspectos que aún quedan por pulir.
This post is licensed under CC BY 4.0 by the author.