Continuación de integración del ejercicio visibility graph
Durante estas últimas semanas he estado puliendo varios detalles relacionados con la integración del ejercicio de visibility graph en Robotics Academy.
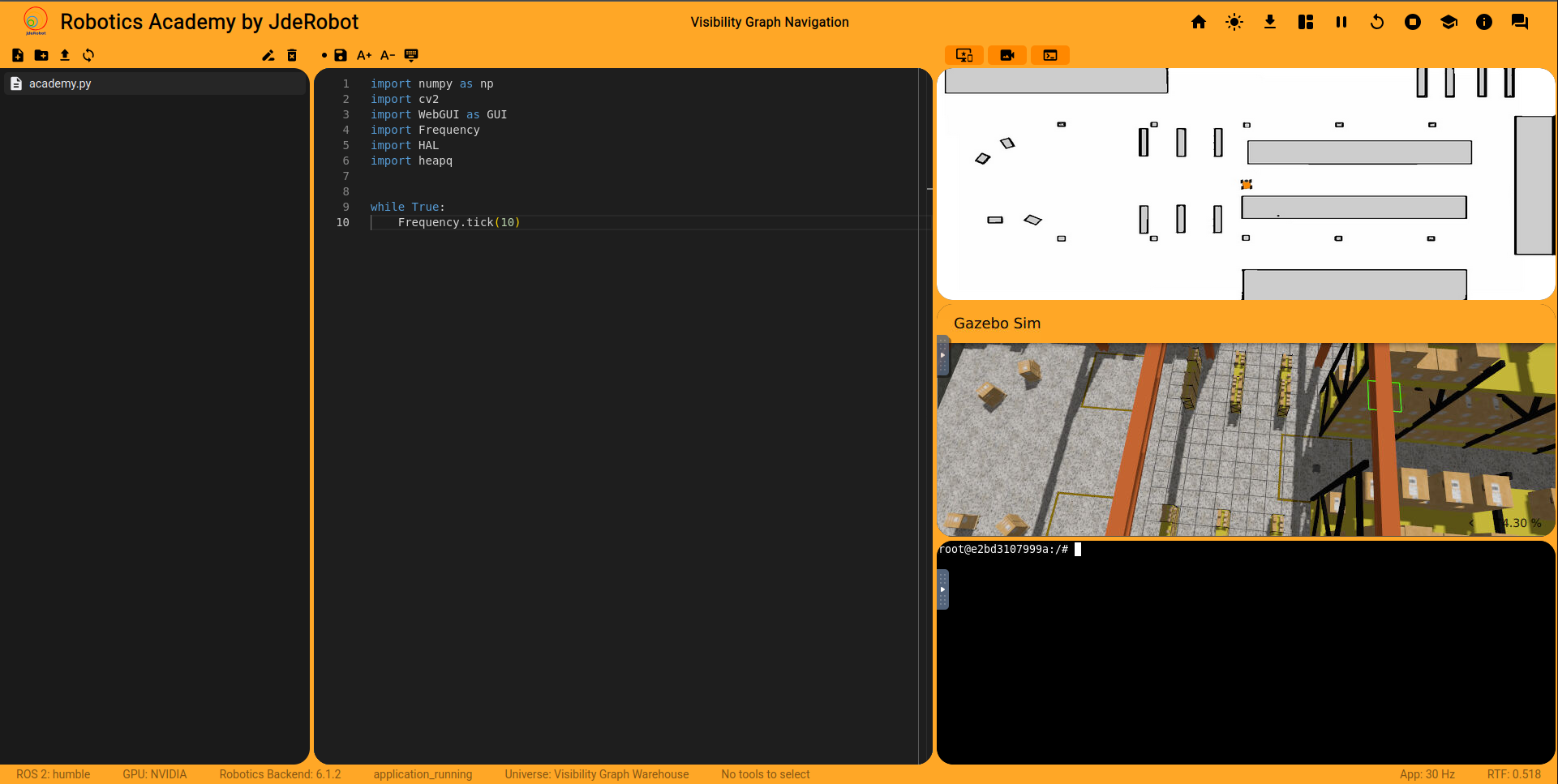
Al iniciar el ejercicio, es necesario pulsar play para establecer la conexión con el backend. Una vez conectado, se muestra el mapa del almacén junto con la posición del Rover dentro del entorno.
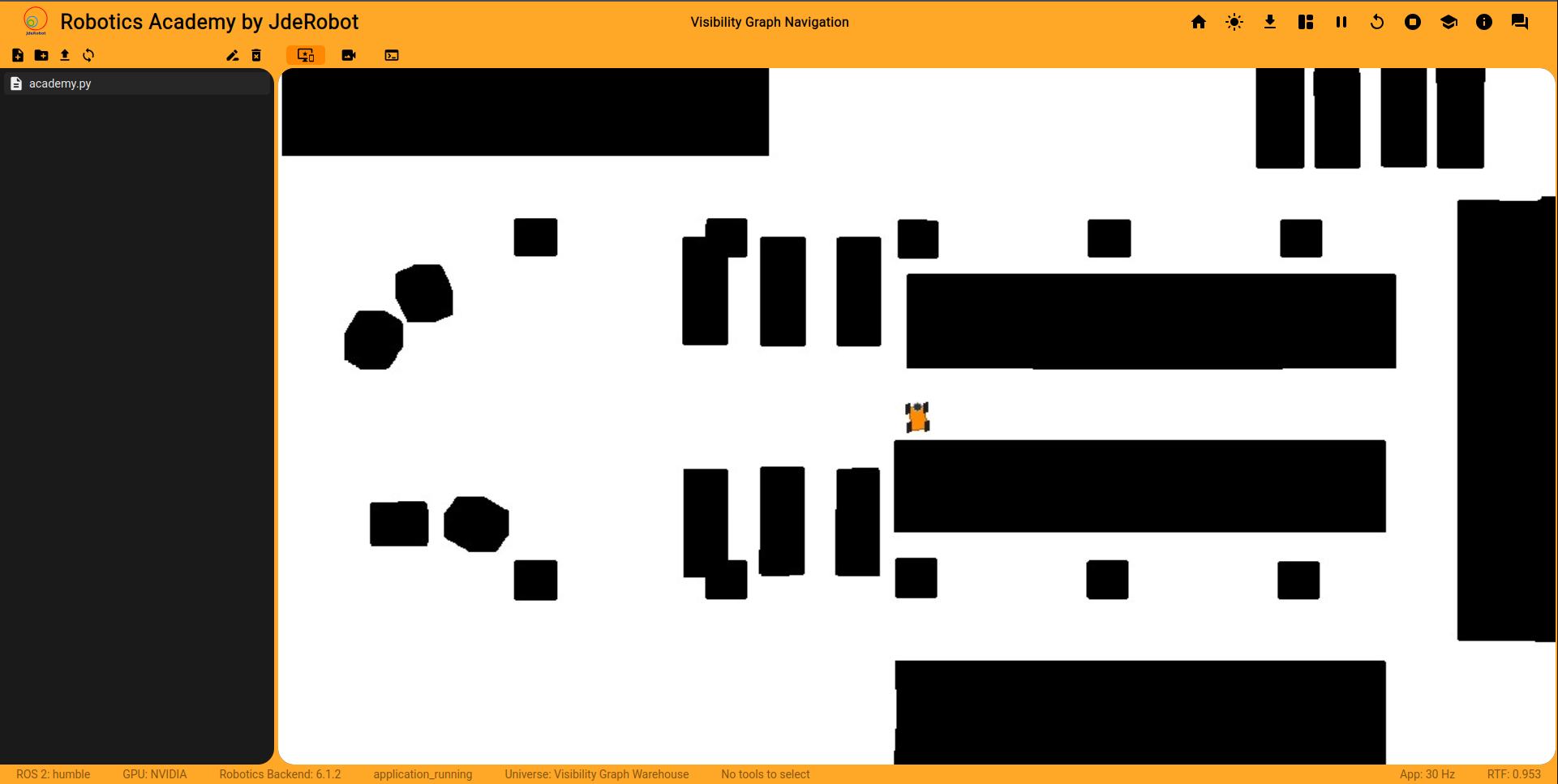
Como puede verse, el Rover está representado mediante un rectángulo acompañado de círculos que simulan las ruedas. Además, el LIDAR permite identificar su orientación dentro del mapa.
A partir de la imagen del mapa, podemos trabajar con OpenCV para realizar operaciones como la dilatación de obstáculos según sea necesario.
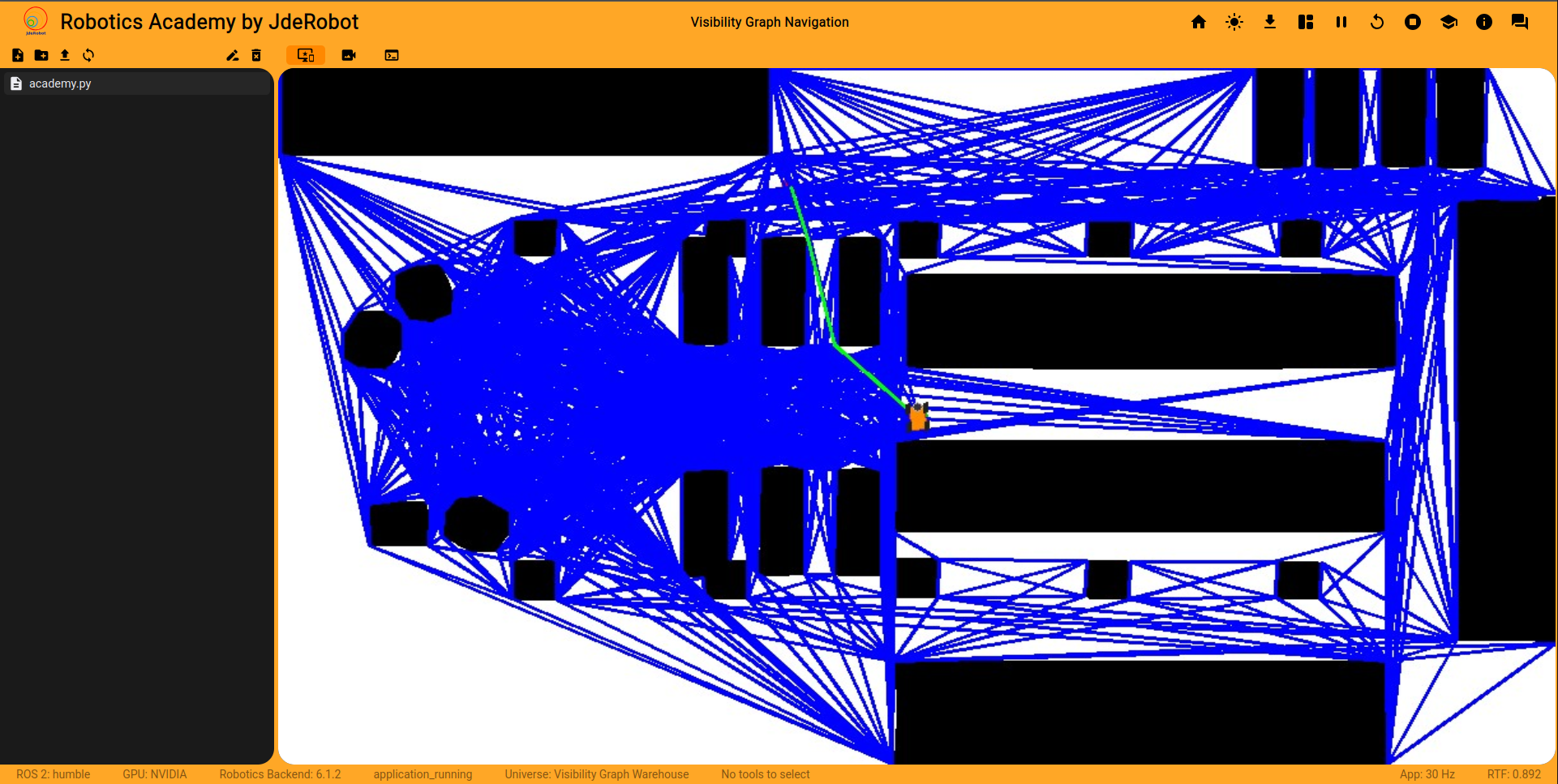
También se ha implementado la función GUI.line((R, G, B), w1, w2), que facilita dibujar líneas sobre el mapa con el color deseado. En la siguiente imagen se puede observar el grafo de visibilidad generado sobre el mapa dilatado, junto con una ruta marcada en verde.