Modelo URDF de robot
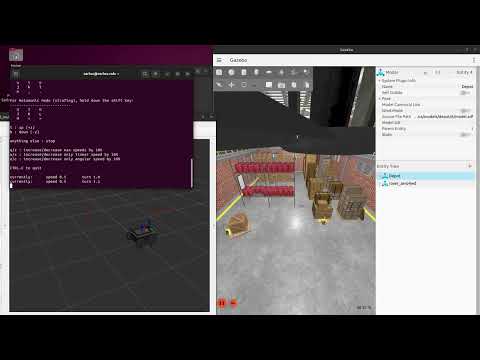
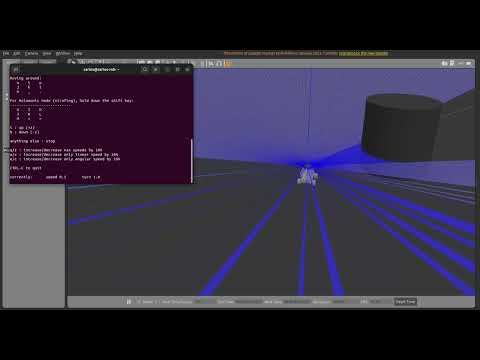
Esta semana estuve trabajando en la selección del modelo URDF del robot. Para entenderlo mejor, estuve siguiendo un tutorial que creaba un robot móvil desde 0. Aprendí a definir cada fichero XACRO y a definir en el launch lo necesario para que lo convierta a un modelo URDF. También estuve viendo cómo usar los plugins para poder hacer el robot omnidireccinal. Ya con el robot listo, me propuse añadirle un láser scan con el plugin necesario. Estuve testeándolo y funcionaba bastante bien. El único problema es que el robot era demasiado inestable, quizá porque las inercias no estaban correctamente definidas.
Estuve viendo robots que pudieran cuadrar en nuestro proyecto y entre ellos vi algunos muy interesantes como en el Husky, Jackal… pero hubo uno que me pareció estupendo y me gustó mucho: el 4WD Rover Pro. Estuve haciendo un paquete de ROS2 y pude moverlo por el almacén y visualizar el topics de ROS en RVIZ. Todo esto funcionaba con Gazebo Fortress perfectamente (los plugins de los URDF eran para este), puesto que ahora he de adaptarlo para Gazebo Harmonic.