
Week 12 - Following the road
With this first week after the summer vacation, I return to the routine with a similar task to the one I had at hand on the summer. Instead of training the car to follow a line, we are going to put our focus on training a car to follow a lane, bringing it closer to a real life problem with the autonomous driving task.
For this, we need to replicate the steps we took on the follow line problem so that we can continue improving the model and analyzing possible improvements. So, to recall, we have 3 major tasks to tackle:
- Create an explicit brain for the follow lane problem
- Create a dataset from the explicit brain algorithm
- Train with our dataset, a PilotNet model
Creating the explicit follow-lane brain
The follow lane brain was already made as seen on the Week 3 post, but building upon this algorithm, I have improve it to take better the curves and to oscillate less when the left lane dissapears for a moment in an intersection.
Creating the dataset for the follow lane
The creation of the dataset follows the same lines as the one we took on the previous post. The dataset contains the images, the steering and the throttle values on the timestep where the image was taken. A total of 5Gb of data was collected giving us an overall of almost 25.000 images. Differences when compared to the dataset on the previous blog resides on the task which was to follow a line, the algorithm created this time to follow the road is more consistent, meaning that the car almost never oscilate, giving us most of the data when the steer is not moving or is moving a negligible amount, and little to none data when it is steering left or right.
By getting the steering values on an histogram we can have a better view of the data from another perspective. In the next image, we can appreciate the imbalance of the data.
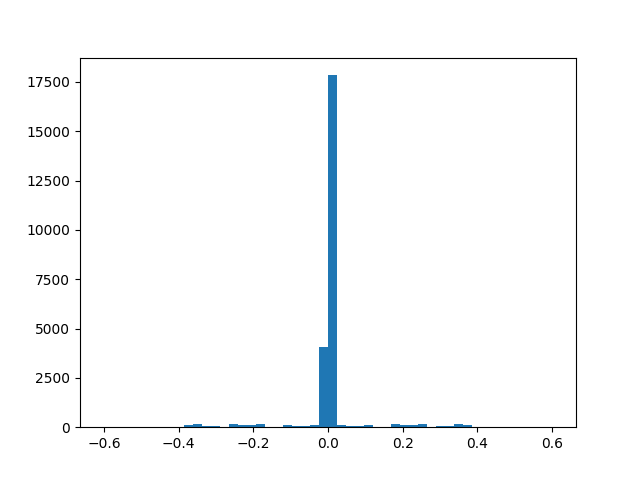
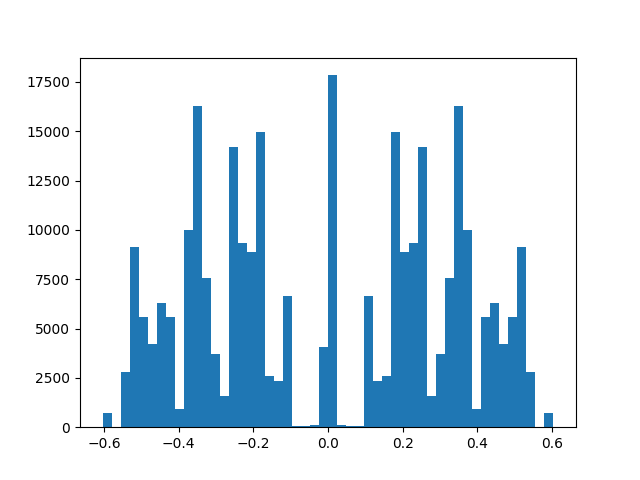
By doing some oversampling, we can try to use better the data, giving more weight to the “extreme” cases that are almost never considered when compared to the straight steering values.
Training the PilotNet model
The training of a PilotNet-based model is pretty straightforward. As explained in the previous posts, we are going to use the Tensorflow library to train the model. Bellow, you can see the video of the car behavior.
As we can check from the video, the car performs well on the straight road, correcting itself in order to stay on the center of the lane. But as soon as it gets to the curve, it doesn’t seems to find the correct way to turn itself. A further research is going to be needed for us to find why the car is not performing as we want it to on the curves, and how to correct it.