
Week 13 - Handling the curve
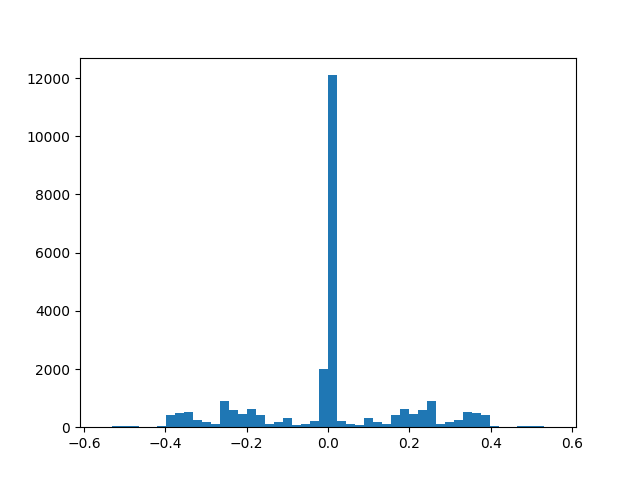
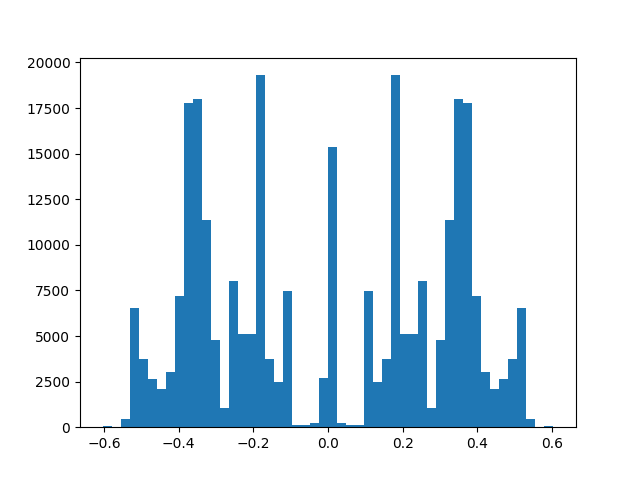
Stumbling myself with an obstacle, in this week, the work was mainly focused on improving the dataset to handle better the curves. We already had a car that was able to follow the road when it was straight, but as soon as a curve was in front of it, it began to fail. The solution for this problem was discused in the previous post, having a dataset mainly composed of straight roads, the car didn’t have much information on how to handle other cases like curves. So, the solution we took was to increase it, by “recording” only the cases where the car was on a curve we are going to have more data for this cases.
The training was increased to 10 epochs. The next image shows us better, the stabilization of the error on the validation dataset.
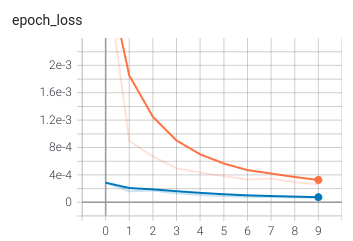
The model obtained from this configuration, gives us a car that is able to follow the straight line pretty smoothly without the oscilation we had on the previous model, but it still not capable of taking the curve correctly.