
12th weeks: More follow-person, moving into Docker and dependencies recipe.
This 12th week has been a problematic one.
The schedule for this week was to continue with the follow-person, add the turtlebot2 and its dependencies to the CustomRobots github and create some kind of “recipe” to install the turtlebot2 dependencies and drivers to move into a dockerised.
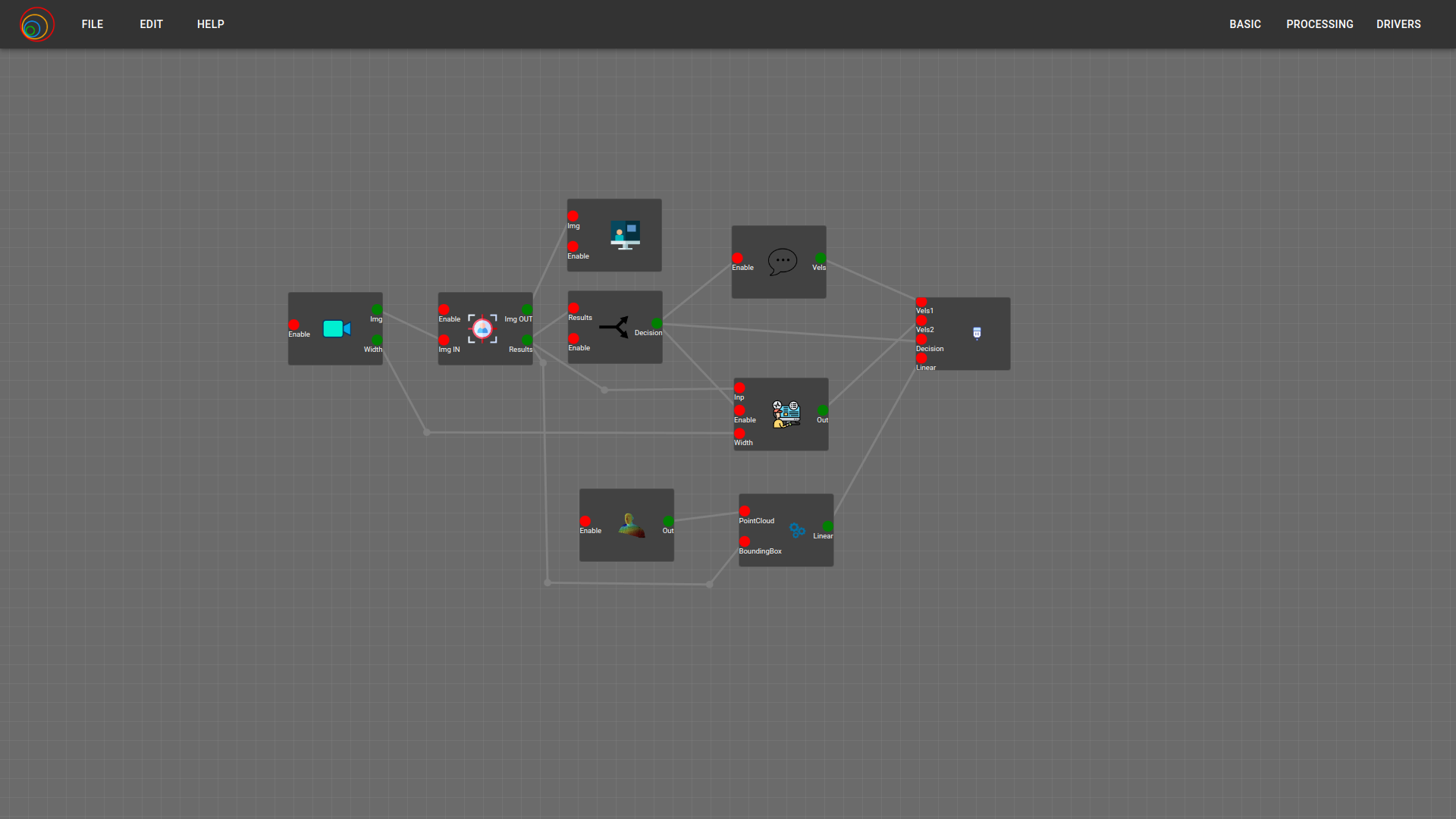
I’ve been working on the follow_person. I updated it by adding a “depth” block that receives a PointCloud2 from a ROS2 topic. It sends the PCl to another block that also receives the bounding box of the person. With this, it finds the central point of the bounding box and gets the distance to the person. This distance is used to get the linear velocity of the turtlebot and keep a constant distance to the person.
For the CustomRobots updates, I’ve also been working on it, but there is a problem that i’ve been unable to solve for the moment. Some of the dependencies for the turtlebot2 spawn in gazebo come from the IntelligentRoboticsLabs Robot github by following the setup instructions in the Readme.md file. But right now (i’ve been testing with the repos for different configurations) when the robot spawns, the base is not visible.
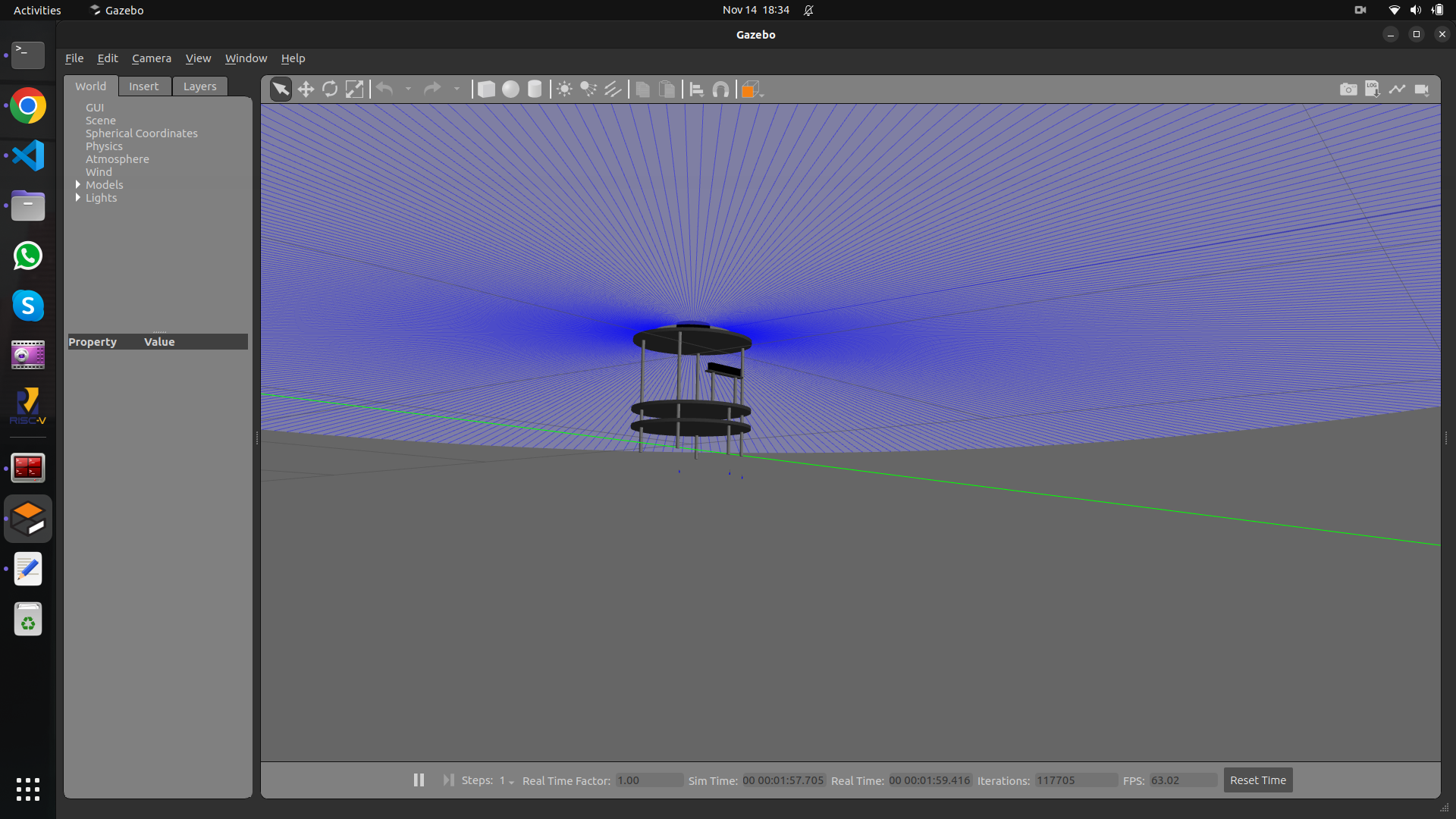
I’ve been searching a lot on this, but haven’t reach a solution yet, so I didn’t update the CustomRobots github with the turtlebot2 things, since it isn’t working for me.
Last but not least, for the installation recipe of the dependencies, i’ve been working on it but won’t be fully available until I update everything into the CustomRobots github. But for now, there is a tempral version here.
Also I couldn’t test the depth updates with the real robot (and almost neither with the simulated one) since I’ve found out that my computer is overheating a lot.

As we can see in the image, with a low % of hardware usage (26% CPU and 21% GPU), it has really high temperature measures (98º CPU and 78º GPU peaks). I will change the thermal paste to try and improve on this side and maybe improve in the performance with the simulation (maybe is the problem with the flickering in the simulated cam).