
14th weeks: Follow-person works!
In this week I’ve finally ended with the follow person!
After so much work, the follow-person is actually done. As the previous week I had almost working the depth block, it is now fully working with an update. When it is used in the real robot, there is a different configuration needed with the quality of service (QoS). It is because the real robot has a non standarised configuration, so the block needs to have some specific QoS to get the data. With the simulated one it is not required, as the simulated camera has a standard configuration.
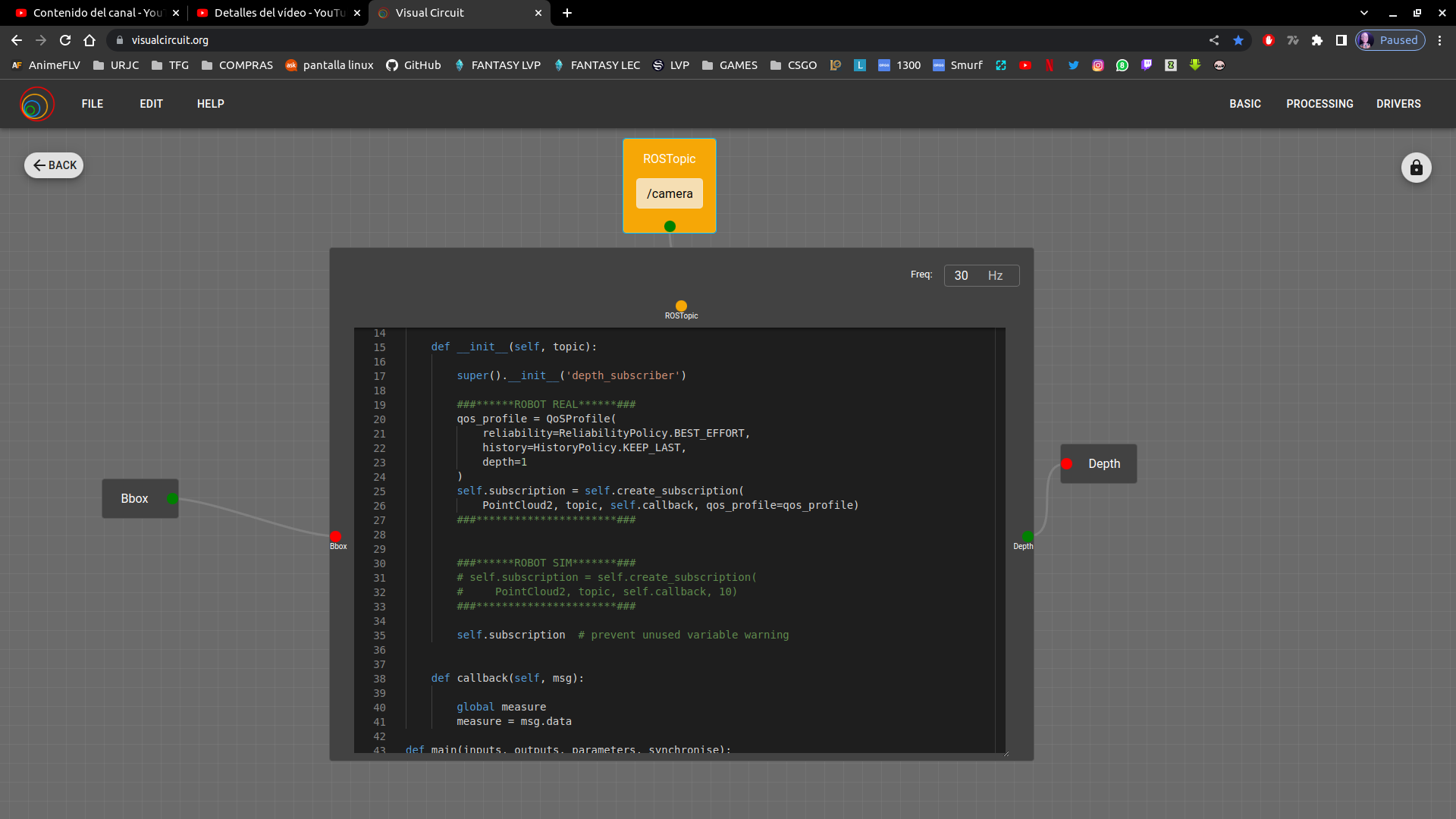
After this, I only needed to adjust the PID for the linear velocity, which is calculated for a distance of 1.5 from the person. I added a maximum of 2 units of speed, for it not to run so fast that my laptop would be in danger.
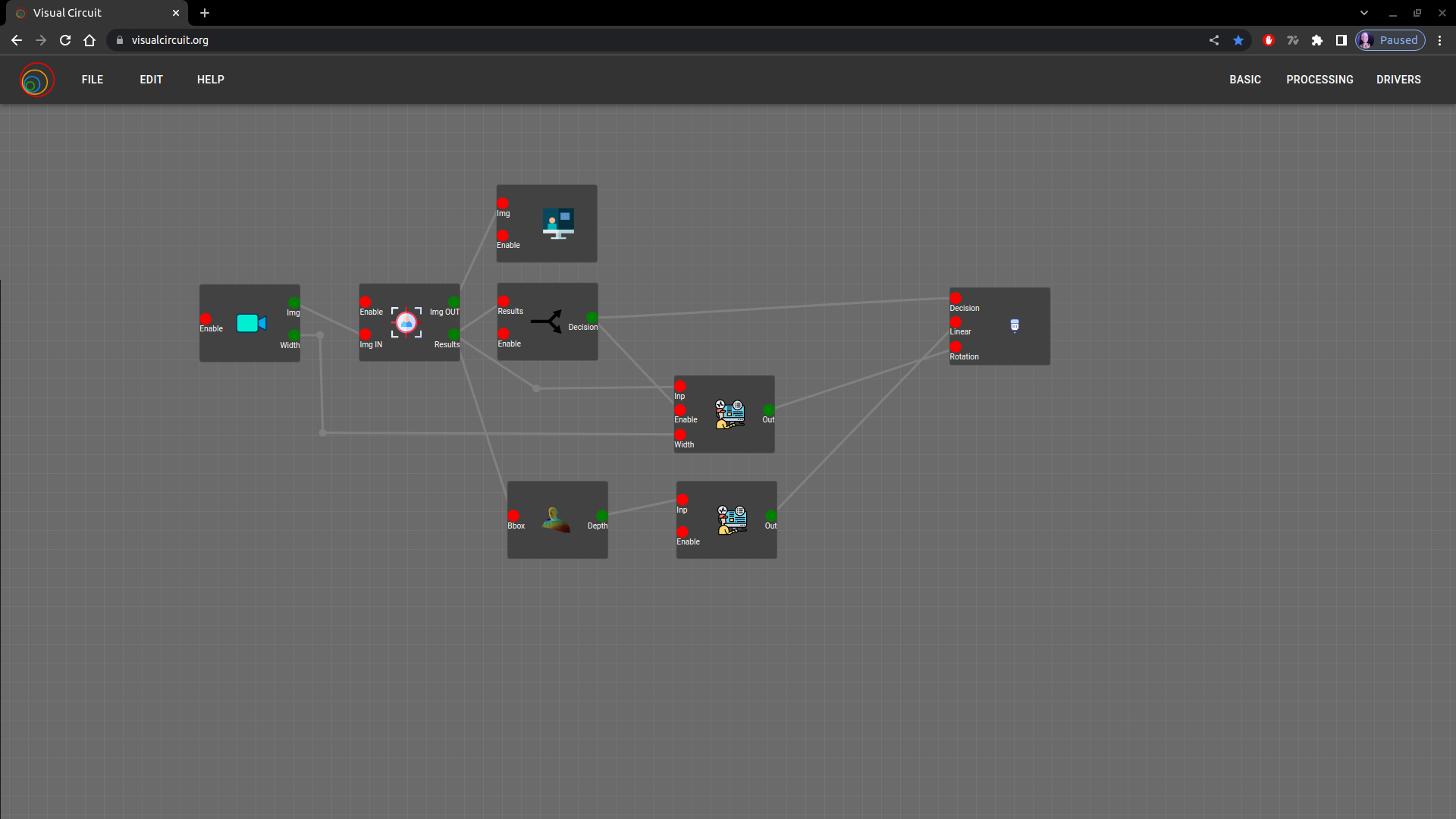
This is the final VisualCircuit project:
Also I need to make a video of the robot, but I had a few problems here:
The video I made from the computer is on 5fps because the app I used to record the screen was badly configured. And also the video I made from my smartphone, was recorded in vertical (because I’m stupid :C), so I cannot use it. Here is the vertical video, but I will make a new video from the laptop on 30/60fps and on landscreen from the smartphone.