
7th week: Problems with Follow-person project.
On the seventh week I had to face several problems.
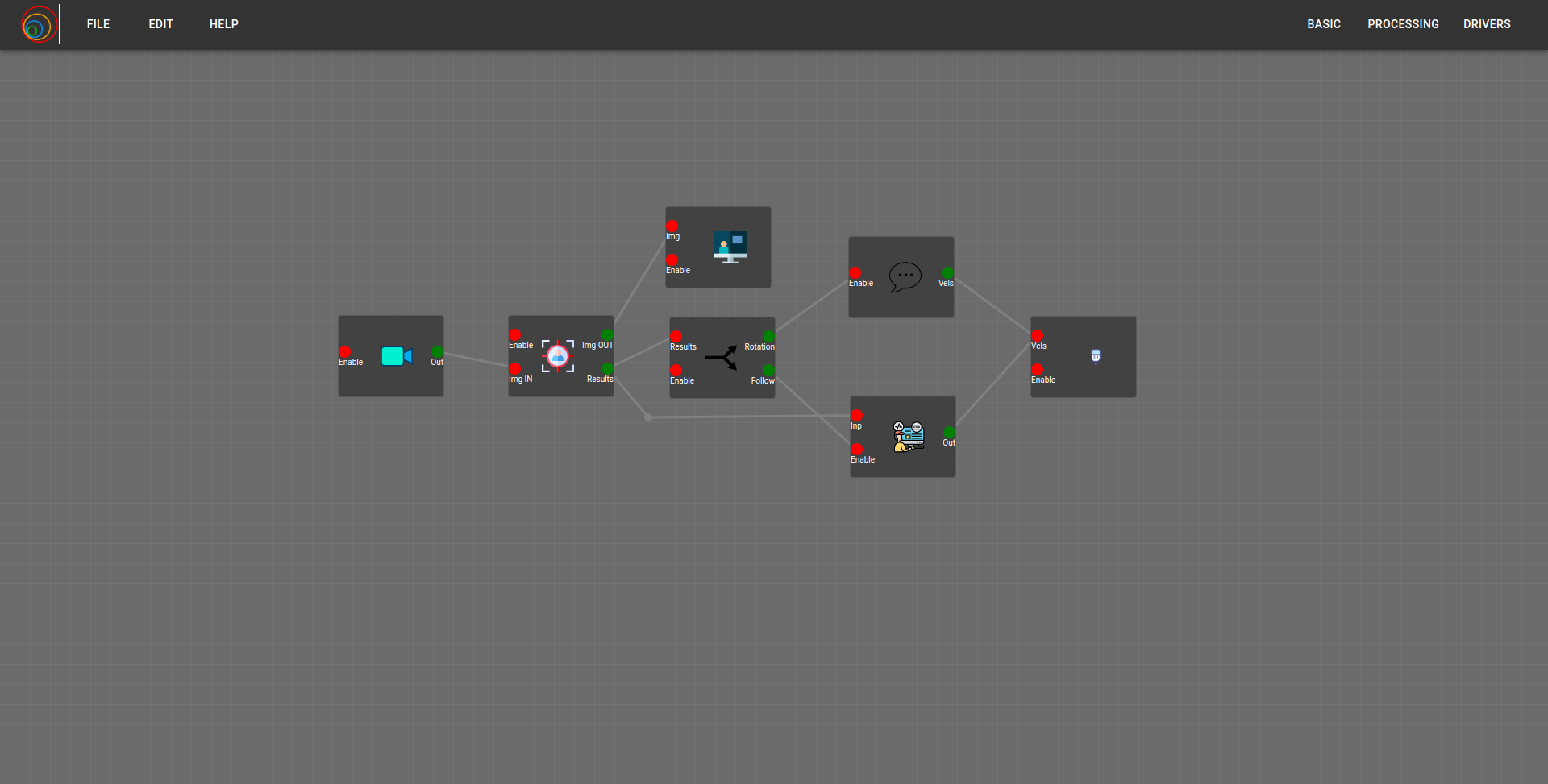
By testing the last model I had, I found out that the outputs and inputs can only have 1 cable connected, because if you use 2 cables in the same output, the info is only shared with one of the cables and not with the other.
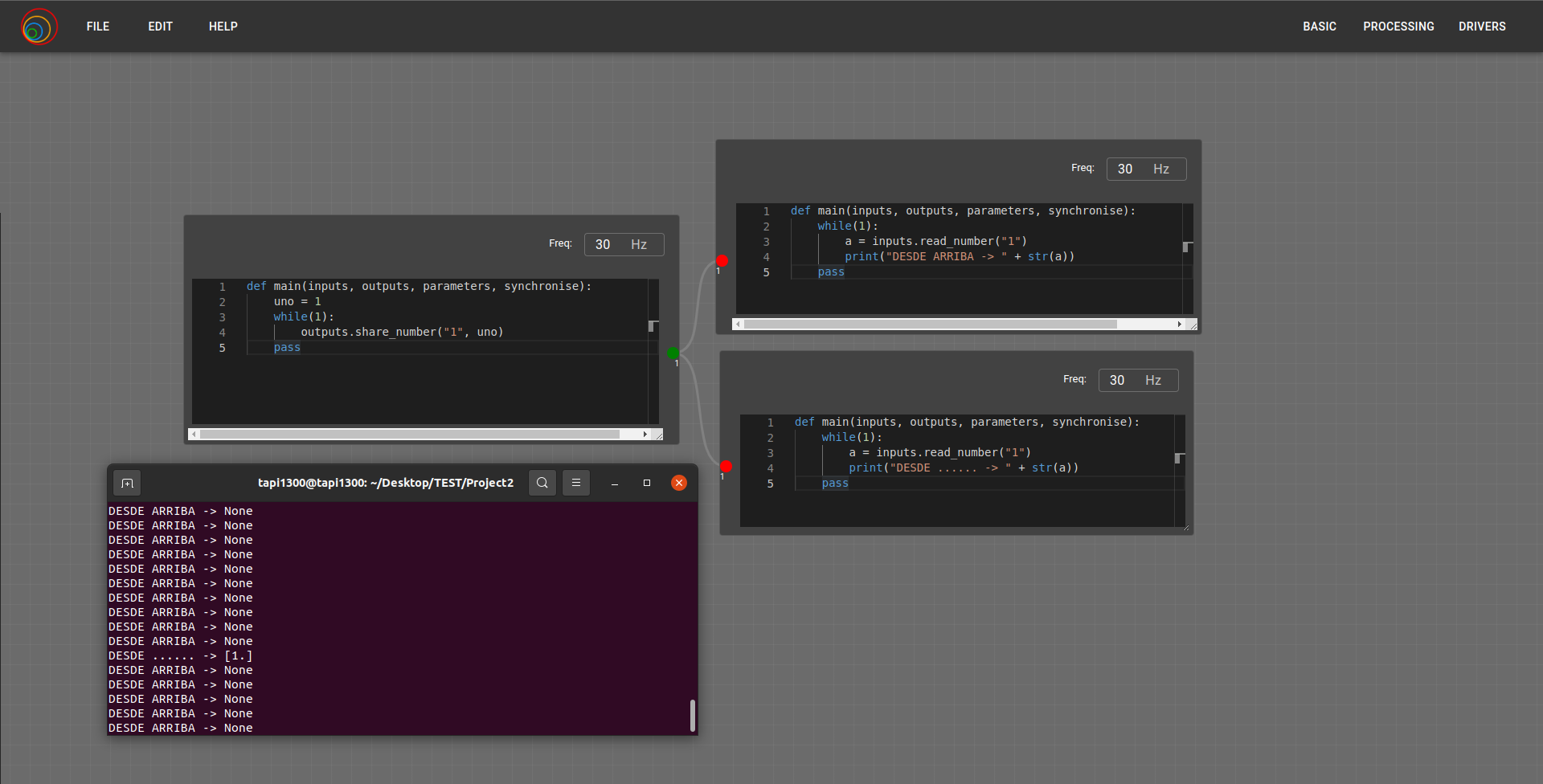
The same thing happens with the inputs, so if you have several cables into the same input, the block only receives from one of them
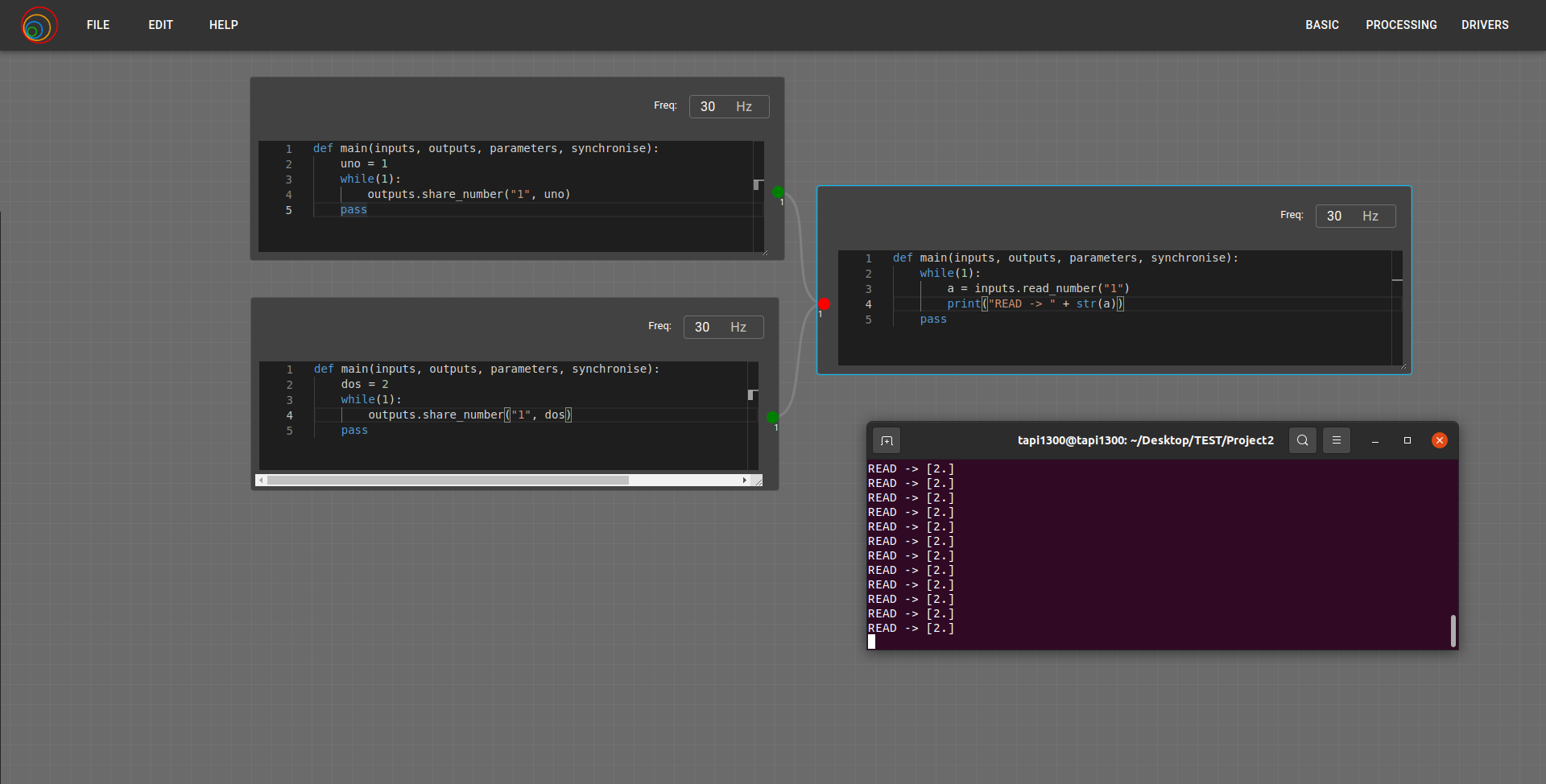
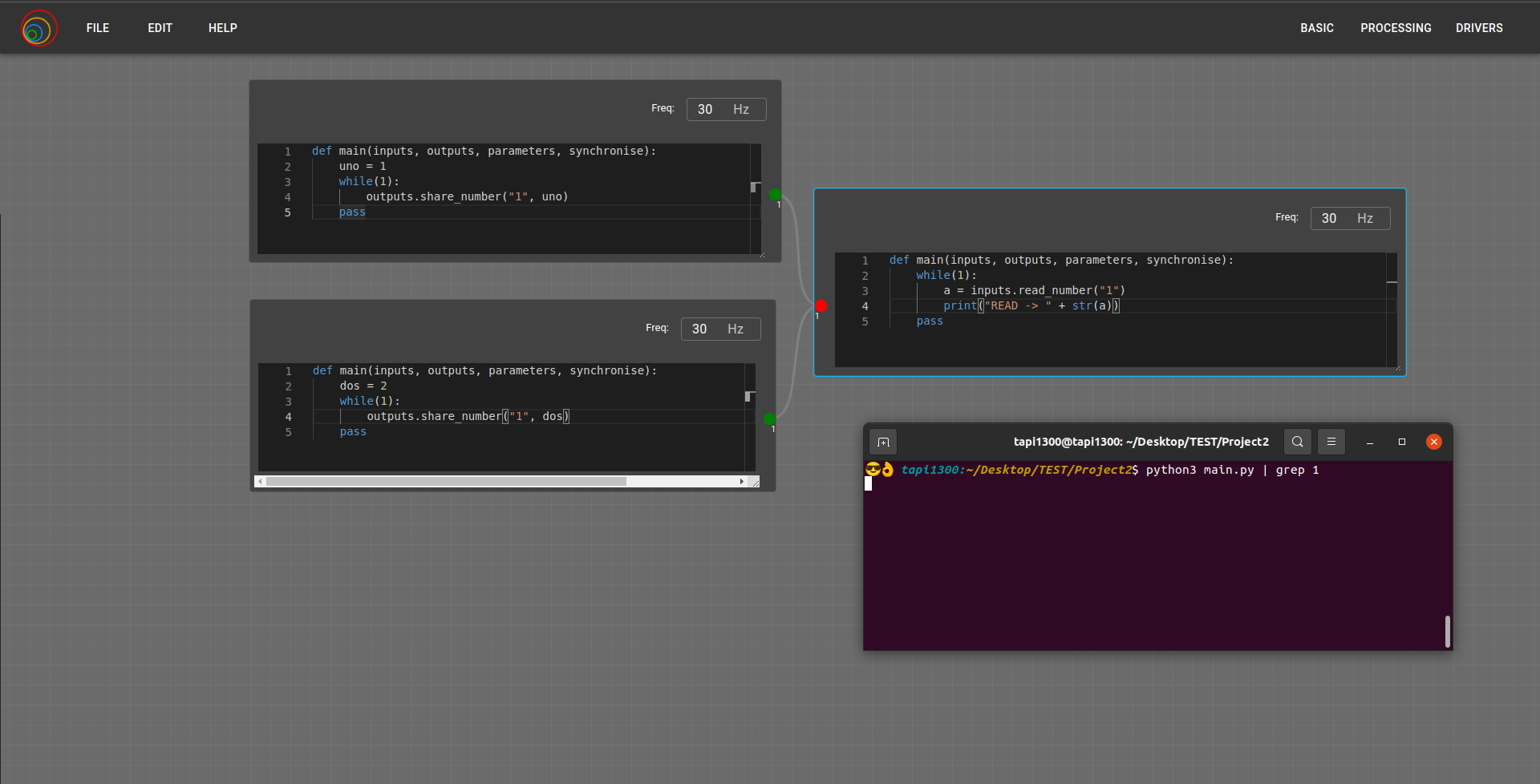
To solve this, we need to add another input/output, so that the info is read or shared several times.
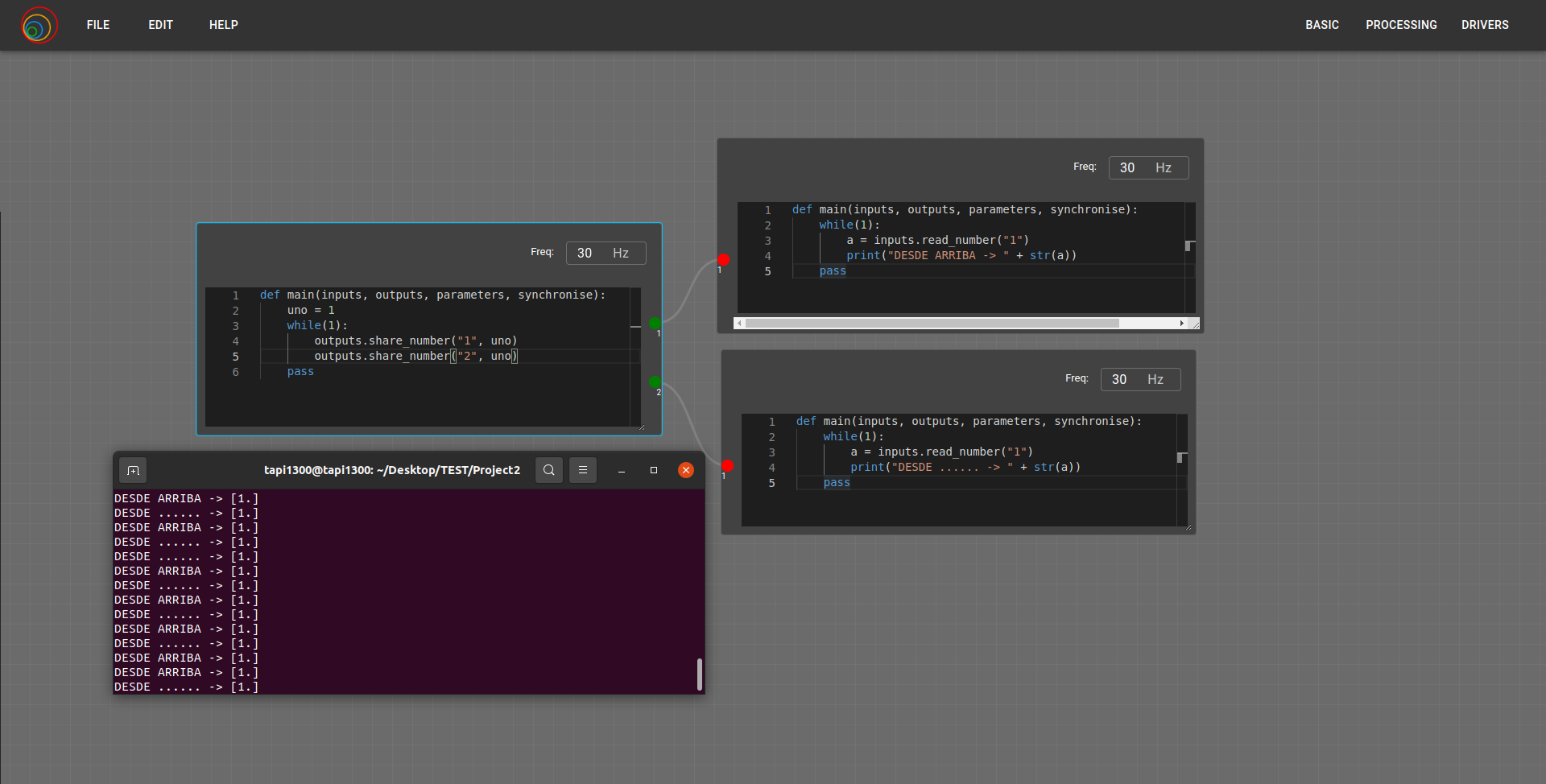
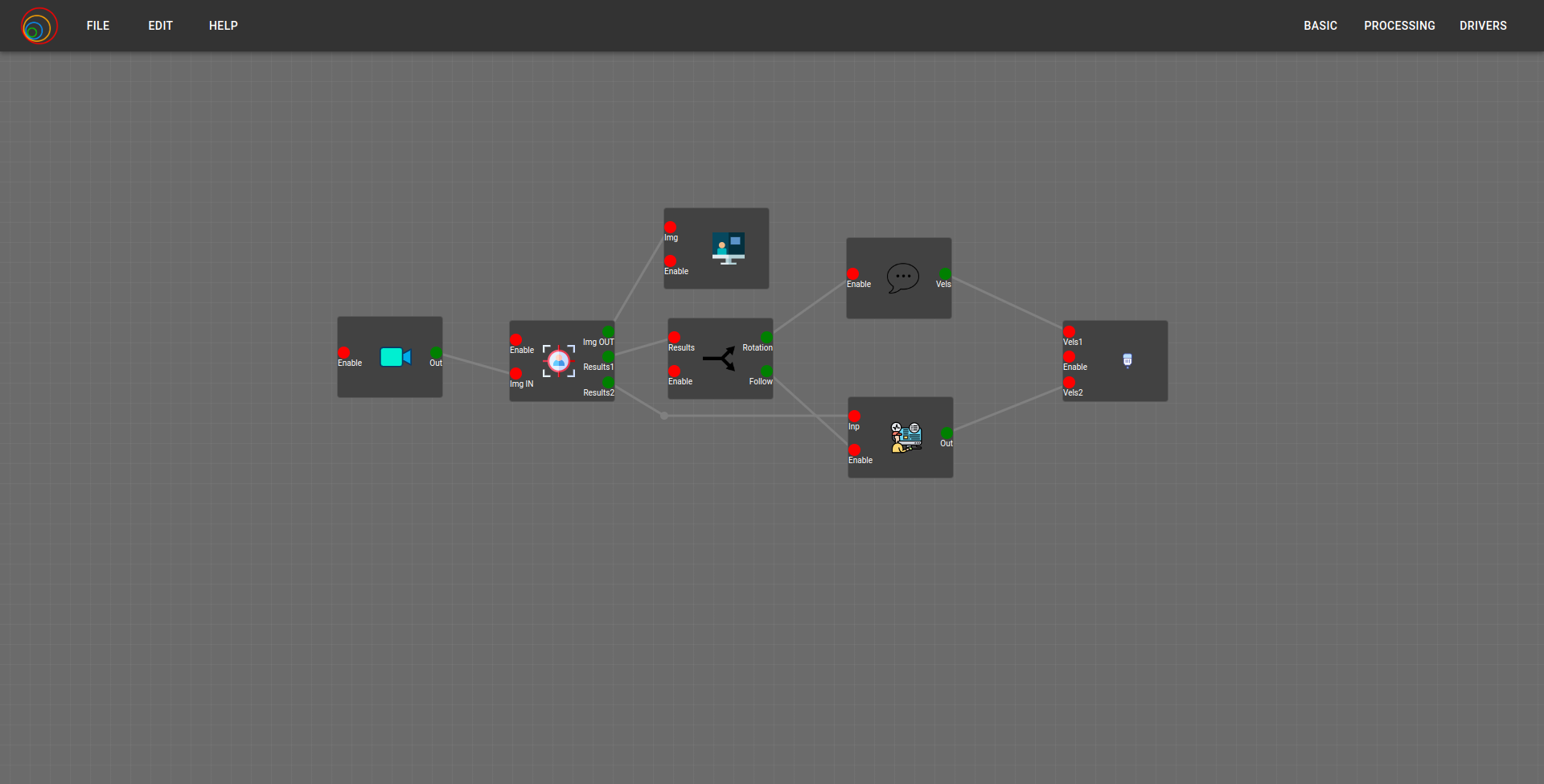
With this in mind, I had to remake the model I had. Because if we remember the last model I had, the results from the ObjectDetector was shared into 2 different blocks, and also the MotorDriver received 2 different velocities depending on what got enabled.
Now I had to change the blocks to have 1 more output/input to be able to have these multicable setup. Also the inside code had to be changed, because now insted of just reading the velocities, we have to read both and see which one is the good one.
Also I faced one more problem. The object detector had a real problem while trying to recognise a “person” while seeing his back. As it is shown in the video, when the person is facing the camera, the bounding box is moreless stable and is always there. But when the person turns around (as it will be in the final program, as the program is to follow a person, so the visible part will be his back), the bounding box blinks, making it imposible to follow the person as it will change from “follow mode” to “searching-person mode” every second.
I’ve been trying to change every parameter and everything in the ObjectDetector block to try and make it stable, but I’ve been unable to achieve it :C
This next week I’ll try to make it work out with a real person or even the real robot to test if the problem is the simulated camera and the low quality of the person model, or if the problem is somewhere else 😔