Trabajos Fin de Grado
2023-2024

Conducción Autónoma con DeepRacer
AWS DeepRacer es un coche de carrera autónomo en una escala de 1/18 diseñado para probar los modelos de RL en una pista de carreras física. En este proyecto desarrollarás comportamientos autónomos de conducción basados en Reinforcement Learning y Deep Reinforcement Learning
ROS, python3, reinforcement learning
Roberto Calvo

Micro ROS y Crazyflie 2.1
ROS 2 para microcontroladores (micro-ros) nos permite utilizar unidades limitadas computacionalmente dentro del ecosistema ROS. En este proyecto desarrollarás comportamientos en sistemas de tiempo real utilizando el mini drone Crazyflie.
ROS, python3, C, sistemas empotrados
Roberto Calvo
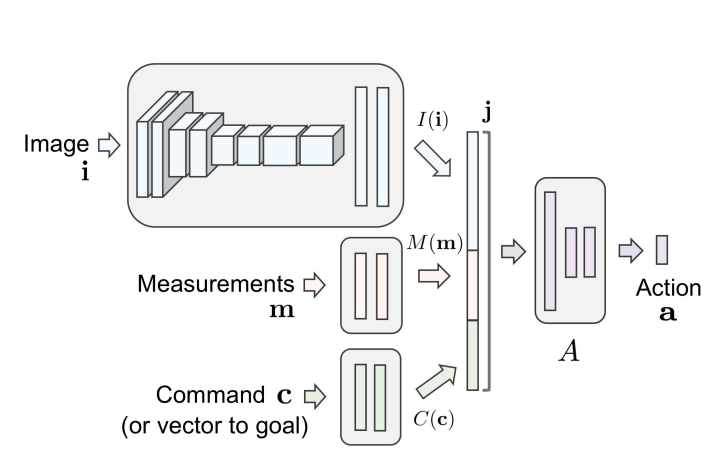
Conducción autónoma mediante comandos de alto nivel
Dentro de la conducción autónoma, se puede realizar un control del vehículo mediante aprendizaje por imitación (imitation learning) y con una perspectiva extremo a extremo (end-to-end). En este proyecto buscamos añadir al control de un vehículo autónomo capacidades para toma de decisiones basadas en comandos de alto nivel como podría ser gira a la derecha o sigue recto.
ROS, Deep Learning, Python3
José María Cañas y Sergio Paniego
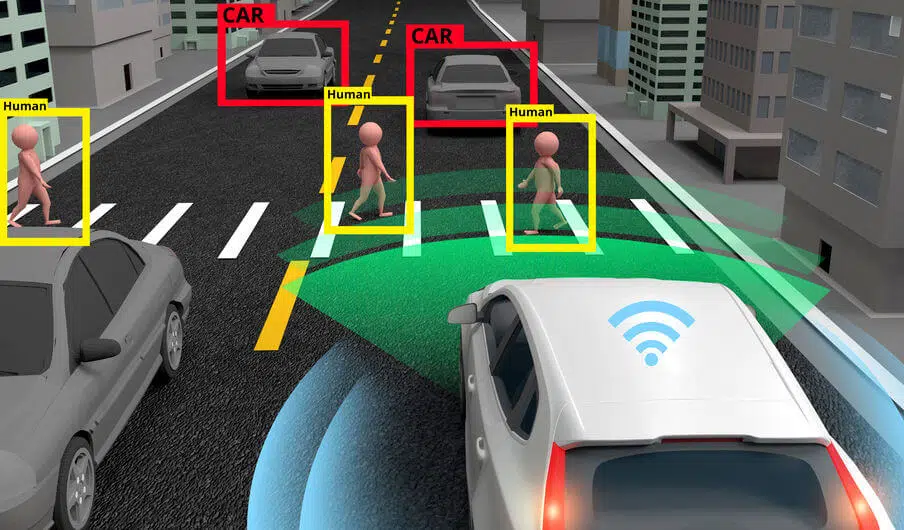
Conducción autónoma con percepción del entorno
Los vehículos autónomos necesitan comprender el entorno para tomar decisiones de calidad. En este proyecto desarrollarás un sistema capaz de conducir teniendo en cuenta señales de tráfico, semáforos… basándonos en visión.
ROS, Deep Learning, Python3
José María Cañas y Sergio Paniego
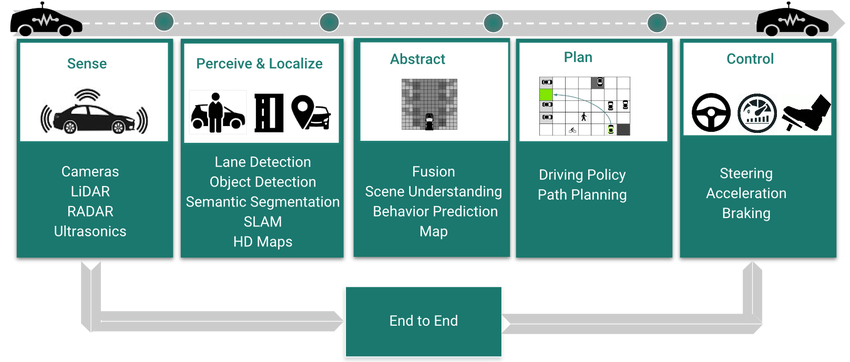
Conducción autónoma con redes especializadas para tareas determinadas
Un sistema de conducción autónoma puede contar con diferentes módulos para realizar un control de mayor calidad. En este proyecto, desarrollarás un sistemas de conducción autónoma capaz de controlar un vehículo mediante módulos especializados en diferentes tareas, como puede ser ir recto o tomar curvas.
ROS, Deep Learning, Python3
José María Cañas y Sergio Paniego