Week 22
WEEK 22
-
I’ve added a bit of documentation explaining the development done with the web serial API.
-
I have opened an issue in the web server repository to integrate it into the master branch.
-
I have added a little change to the kibotics page layout for the real mbot, adding only one button (run).
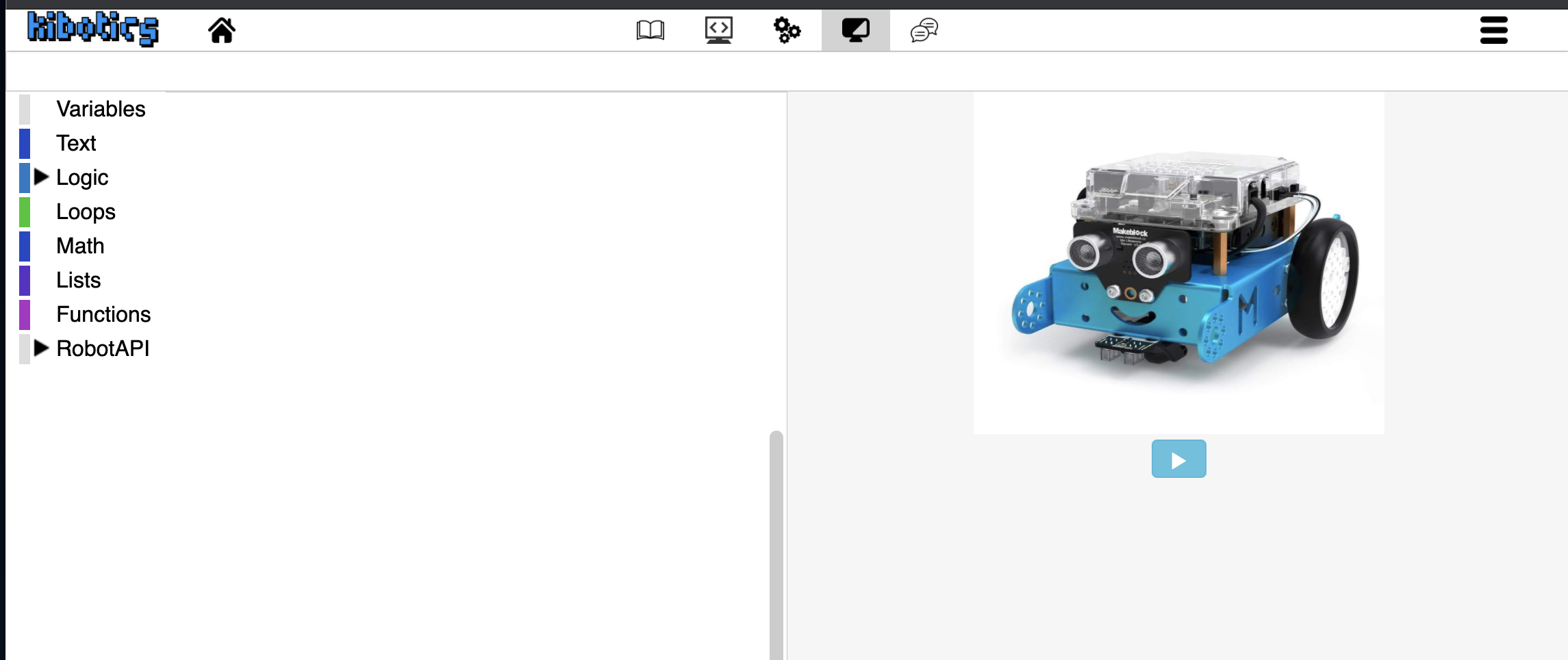
Also I have added the procedure to load the program in macOs and windows with api webserial, in the webIDE exercises for the real mbot.

-
I have made a small example of a python program for the real mbot => Video of the program
-
I configured the kibotics-drives repository on my local machine to be able to use the tello drone. I’ve managed to get it up and running.