
Brain y visualización de nubes de puntos LiDAR
Construcción del brain y visualización del nubes de puntos LiDAR
Esta semana hemos logrado arreglar los problemas de visualización del sensor LiDAR. Ya se puede visualizar exitosamente la nube de puntos a medida que avanza la simulación y se teleopera un vehículo. Una vez arreglados los problemas de visualización y estructurado el código, ya tenemos creado el cerebro.
Nuestro cerebro tiene las siguientes funciones:
- Control del vehículo.
- Generar y visualizar datos de un sensor LiDAR.
- Visualizar vista frontal del vehículo.
Control del vehículo
Esta función es la que establece el control manual del vehículo para poder teleoperarlo mediante teclado (teclas W,A,S,D):
def control(vehicle):
control = carla.VehicleControl()
# Leer teclas
keys = pygame.key.get_pressed()
# valores iniciales
control.throttle = 0.0
control.steer = 0.0
control.brake = 0.0
control.hand_brake = False
control.reverse = False
# W acelerar
if keys[pygame.K_w]:
control.throttle = 1.0
# S retroceso/stop
if keys[pygame.K_s]:
if vehicle.get_velocity().length() < 0.1:
# Si está casi parado: poner marcha atrás
control.reverse = True
control.throttle = 1.0
else:
# Si va hacia adelante: frenar
control.brake = 1.0
# A girar a la izquierda
if keys[pygame.K_a]:
control.steer = -0.5 # negativo = izquierda
# D : girar a la derecha
if keys[pygame.K_d]:
control.steer = 0.5 # positivo = derecha
# Aplicar al vehículo
vehicle.apply_control(control)
Sensor LiDAR
Para la parte del sensor LiDAR, se aplican las funciones set_lidar, que añade el LiDAR semántico (etiqueta los puntos con la clase del objeto) al vehículo y lo ‘spawnea’ en el escenario del simulador, y lidar_callback, encargada de estructurar los datos y las coordenadas del sensor para poder visualizarlos. Además, se ha utilizado esta vez el sensor sensor.lidar.ray_cast_semantic, que además de devolver una nube de puntos, cada uno de estos tiene una etiqueta semántica (clase de objeto detectado).
A continuación, se muestran las funciones del sensor LiDAR:
def set_lidar(world, ego_vehicle, delta):
# Crear LiDAR
lidar_transform = carla.Transform(carla.Location(z=2.5))
lidar_bp = world.get_blueprint_library().find('sensor.lidar.ray_cast_semantic')
lidar_bp.set_attribute('channels', '128') # Número de rayos
lidar_bp.set_attribute('range', '100') # Alcance en metros
lidar_bp.set_attribute('rotation_frequency', str(1 / delta)) # Hz
lidar_bp.set_attribute('points_per_second', '1200000')
# Spawnear sensor y aplicarlo al vehículo
sensor_lidar = world.spawn_actor(lidar_bp, lidar_transform, attach_to=ego_vehicle)
return sensor_lidar
# Función de callback del sensor LiDAR
def lidar_callback(lidar_data, point_cloud, vehicle_transform, absolute_view):
# Definir el formato del paquete de datos del LiDAR semántico
dtype = np.dtype([
('x', np.float32),
('y', np.float32),
('z', np.float32),
('cos_inc_angle', np.float32),
('object_idx', np.uint32),
('object_tag', np.uint32)
])
# Convertir los datos binarios a un array de numpy con el dtype estructurado
data = np.frombuffer(lidar_data.raw_data, dtype=dtype)
# Extraer coordenadas de los puntos
points = np.vstack((data['x'], data['y'], data['z'])).T
# Reflejar los datos en el eje X (para ajustarlos al sistema CARLA)
points[:, 0] = -points[:, 0]
# Obtener etiquetas semánticas (object_tag)
semantic_tags = data['object_tag']
# Asignar color según la etiqueta semántica
# Por ejemplo, con el colormap inferno o viridis
normalized_tags = (semantic_tags - semantic_tags.min()) / (np.ptp(semantic_tags) + 1e-6)
colors = VIRIDIS[(normalized_tags * (VIRIDIS.shape[0]-1)).astype(np.int32)]
if absolute_view:
vehicle_location = np.array([
-vehicle_transform.location.x,
vehicle_transform.location.y,
vehicle_transform.location.z
])
pitch = vehicle_transform.rotation.pitch
yaw = vehicle_transform.rotation.yaw
roll = vehicle_transform.rotation.roll
rotation_matrix = euler_to_rotation_matrix(pitch, yaw, roll).T
# Transformar los puntos al sistema global
points = (rotation_matrix @ points.T).T + vehicle_location
# Actualizar el point cloud en Open3D
point_cloud.points = o3d.utility.Vector3dVector(points)
point_cloud.colors = o3d.utility.Vector3dVector(colors)
Cámara frontal
Para establecer una cámara RGB en el vehículo y poder así visualizar el recorrido de este mientras se teleopera, se han añadido las siguiente funciones:
# Función para establecer cámara en el vehículo
def set_camera(world, vehicle):
camera_bp = world.get_blueprint_library().find('sensor.camera.rgb')
camera_bp.set_attribute('image_size_x', '800')
camera_bp.set_attribute('image_size_y', '600')
camera_bp.set_attribute('fov', '90')
camera_transform = carla.Transform(
carla.Location(x=1.5, z=1.2), # 1.5 m adelante, 1.2 m de altura
carla.Rotation(pitch=0.0, yaw=0.0, roll=0.0)) # mirando hacia adelante
camera = world.spawn_actor(camera_bp, camera_transform, attach_to=vehicle)
return camera
Nota: la visión que muestra la cámara es la frontal, es decir, la que se vería si se colocara la cámara en el capó del coche:
# Función para procesar imágenes de la cámara
def camera_callback(image, display):
array = np.frombuffer(image.raw_data, dtype=np.uint8)
array = np.reshape(array, (image.height, image.width, 4))
array = array[:, :, :3] # Quitar el canal alfa
array = array[:, :, ::-1] # Convertir de BGRA a RGB
surface = pygame.surfarray.make_surface(array.swapaxes(0, 1))
display.blit(surface, (0, 0))
# Actualizar solo esta superficie en vez de toda la pantalla
pygame.display.update(display.get_rect())
Función principal: brain()
La función brain() es la que se encarga de conectar con el servidor, configurar y añadir todos los agente al escenario del simulador (‘Town05’, en este caso), procesa eventos del simulador, actualiza la nube de puntos y, además, maneja las distintas vistas en la visualización del sensor LiDAR. A continuación, se muestra el código del cerebro:
# Cerebro / Función principal
def brain():
pygame.init()
# Configurar Pygame sin usar OpenGL explícitamente
pygame.display.gl_set_attribute(pygame.GL_ACCELERATED_VISUAL, 0)
width, height = 800, 600
screen = pygame.display.set_mode((width, height), pygame.SRCALPHA)
pygame.display.set_caption("CARLA Vehículo Control")
# Conexión con servidor de Carla
client = carla.Client('localhost', 2000)
client.set_timeout(10.0)
client.load_world('Town05') #Establecer escenario determinado
# Crear escenario
world = client.get_world()
# Librería del simulador
blueprint_library = world.get_blueprint_library()
traffic_manager = client.get_trafficmanager(8000) # Control del tráfico de vehículos automáticos
traffic_manager.set_synchronous_mode(True) # Modo síncrono: avanza en cada "world.tick()"
traffic_manager.set_global_distance_to_leading_vehicle(2.5) # Distancia de seguridad entre vehículos
# Configuración del simulador
settings = world.get_settings() # Obtener configuración actual
delta = 0.033 # 0.05 s por cada tick: 20 FPS
settings.fixed_delta_seconds = delta # la simulación avanza cada 0.05 s
settings.synchronous_mode = True # Activa el modo síncrono
world.apply_settings(settings) # Aplica los ajustes modificados
# Librería de vehículos
vehicle_blueprints = blueprint_library.filter('*vehicle*')
# Cogemos todos los puntos de aparición predefinidos del escenario
spawn_points = world.get_map().get_spawn_points()
# Seleccionamos un vehículo determinado de la librería
vehicle_bp = vehicle_blueprints.find('vehicle.audi.tt')
# Generar vehículo con el que se va a trabajar
ego_vehicle = world.spawn_actor(vehicle_bp, spawn_points[0])
if ego_vehicle is not None:
print('Vehículo spawneado correctamente')
# Establecer sensor LiDAR al vehículo
lidar = set_lidar(world, ego_vehicle, delta)
# Establecer cámara rgb al vehículo
camera = set_camera(world, ego_vehicle)
global actor_list, current_view_index, origin_sphere_added, absolute_view
actor_list.append(ego_vehicle)
actor_list.append(camera)
actor_list.append(lidar)
camera.listen(lambda image: camera_callback(image, screen))
# Crear nube de puntos y llamar al callback
point_cloud = o3d.geometry.PointCloud()
lidar.listen(lambda data: lidar_callback(data, point_cloud, lidar.get_transform(), absolute_view))
# Visualizador de Open3D y configuraciones iniciales
viz = o3d.visualization.VisualizerWithKeyCallback()
viz.create_window(window_name='Sensor LiDAR', width=960, height=540, left=480, top=270)
viz.get_render_option().background_color = [0.05, 0.05, 0.05]
viz.get_render_option().point_size = 1.35
viz.get_render_option().show_coordinate_frame = True
# Configurar vista
set_camera_view(viz,current_view_index)
#Inicializar efera en el origen
origin_sphere = create_origin_sphere()
origin_sphere_added = False
def toggle_camera_view(_):
global current_view_index, absolute_view, origin_sphere_added
# Alternar a la siguiente vista en el array de cámaras
current_view_index = (current_view_index + 1) % len(camera_views)
set_camera_view(viz, current_view_index)
# Activar o desactivar vista absoluta y la esfera en el origen
absolute_view = (current_view_index == len(camera_views) - 1) # Vista cenital como absoluta
if absolute_view and not origin_sphere_added:
viz.add_geometry(origin_sphere)
origin_sphere_added = True
elif not absolute_view and origin_sphere_added:
viz.remove_geometry(origin_sphere)
origin_sphere_added = False
print(f"Cambiando a vista {current_view_index + 1}")
return True
# Callback para alternar vistas
viz.register_key_callback(ord("V"), toggle_camera_view)
# Ciclo principal de visualización
lidar_data_received = False
dt0 = datetime.now()
frame = 0
try:
while True:
# Procesar control del vehículo
control(ego_vehicle)
# Procesar eventos de Pygame
for event in pygame.event.get():
if event.type == pygame.QUIT:
print("\n Cierre de ventana detectado.")
raise KeyboardInterrupt
# Añadir nube de puntos al visualizador una sola vez
if frame == 5 and not lidar_data_received:
viz.add_geometry(point_cloud)
lidar_data_received = True
print("Nube de puntos añadida a Open3D")
# Actualizar visualización
viz.update_geometry(point_cloud) # actualizar nube de puntos
viz.poll_events() # procesar eventos del sistema de ventanas
viz.update_renderer() # actualizar el contenido de la ventana
time.sleep(0.03)
world.tick() # avanzar la simulación
# Mostrar FPS
process_time = datetime.now() - dt0
if process_time.total_seconds() > 0:
fps = 1.0 / process_time.total_seconds()
sys.stdout.write(f'\rFPS: {fps:.2f} ')
sys.stdout.flush()
dt0 = datetime.now()
frame += 1
# Salir si Open3D se cierra
if not viz.poll_events():
break
except KeyboardInterrupt:
pass
finally:
cleanup()
Resultado de la visualización del LiDAR
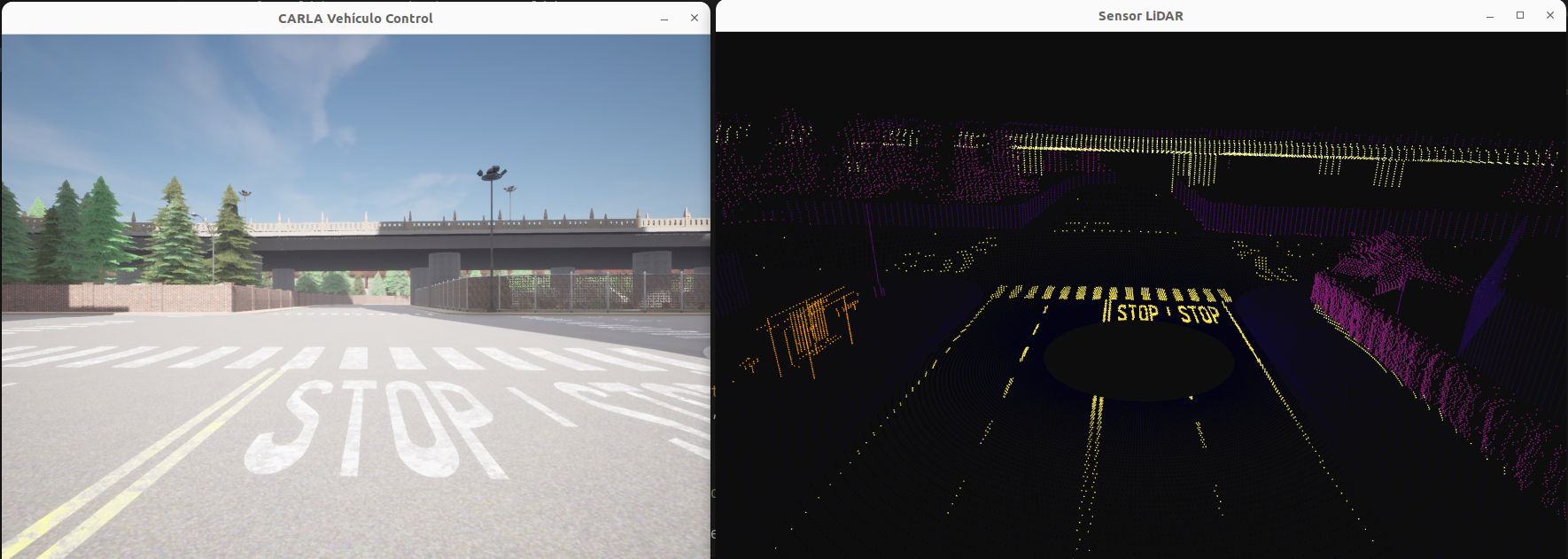
Al ejecutar el código anterior junto con el simulador, aparecen las siguiente ventanas de simulación: cámara frontal del vehículo generado (izquierda) y la visualización del sensor LiDAR.
[Futuros avances]
Tras haber creado ya brain(), el siguiente paso será el de procesar los datos del LiDAR para entrenar un modelo que en función de estos datos, sea capaz de darnos una salida que sea el comportamiento que deben de seguir los actuadores del vehículo (throttle, steer, brake).
El modelo que prevemos utilizar, será de Imitation Learning (aprendizaje por imitación). A priori, tendremos que utilizar un dataset con suficientes muestras de conducción experta, para que el modelo las aprenda, o bien generaremos muestras estableciendo el autopilot al vehículo en Carla. Un posible modelo a implementar sería PilotNet (de NVIDIA), que es muy utilizado para conducción autónoma a partir de imágenes (desconozco por el momento si también se ha entrenado con nubes de puntos). Las siguientes semanas seguiremos avanzando por esta línea.